



Decreto Ministero dei Trasporti - 28/02/2018 - Sperimentazione su strada di guida connessa e automatica
OGGETTO: Modalità attuative e strumenti operativi della sperimentazione su strada delle soluzioni di Start Riad e di guida connessa e automatica.
MINISTERO DELLE INFRASTRUTTURE E DEI TRASPORTI
DECRETO 28 febbraio 2018
Modalità attuative e strumenti operativi della sperimentazione su strada delle soluzioni di Start Riad e di guida connessa e automatica.
IL MINISTRO DELLE INFRASTRUTTURE E DEI TRASPORTI
Visto il regolamento (CE) n. 377/2014 del Parlamento e del Consiglio europeo del 3 aprile 2014, che istituisce il programma Copernico e abroga il regolamento (UE) n. 911/2010;
Vista la direttiva n. 2010/40/UE del Parlamento europeo e del Consiglio del 7 luglio 2010, sul quadro generale per la diffusione dei sistemi di trasporto intelligenti nel settore del trasporto stradale e nelle interfacce con altri modi di trasporto;
Vista la legge 24 dicembre 1969, n. 990, e successive modificazioni, recante: «Assicurazione obbligatoria della responsabilità civile derivante dalla circolazione dei veicoli a motore e dei natanti»;
Visto il decreto legislativo 30 aprile 1992, n. 285, di seguito codice della strada, e, in particolare, l’art. 13, comma 6;
Visto il decreto legislativo 30 luglio 1999, n. 300, e successive modificazioni, recante: «Riforma dell’organizzazione del Governo»;
Visto il decreto legislativo 30 marzo 2001, n. 165, e, in particolare, l’art. 4, comma 1, lettera b), il quale prevede che agli organi di governo spetta la definizione, tra l’altro, di direttive generali per l’azione amministrativa e per la gestione;
Visto il decreto-legge 18 ottobre 2012, n. 179, convertito, con modificazioni, dalla legge 17 dicembre 2012, n. 221, e, in particolare, l’art. 8 il quale, ai fini del recepimento della richiamata direttiva n. 2010/40/UE, stabilisce i settori di intervento costituenti obiettivi prioritari per la diffusione e l’utilizzo, in modo coordinato e coerente, di sistemi di trasporto intelligenti sul territorio nazionale;
Visto il decreto legislativo 18 aprile 2016, n. 50, recante: «Codice dei contratti pubblici», e, in particolare, l’art. 214, comma 3;
Vista la legge 27 dicembre 2017, n. 205, e, in particolare, l’art. 1, comma 72, il quale autorizza la sperimentazione su strada delle soluzioni di Start Riad e di guida connessa e automatica, prevedendo che con decreto del Ministro delle infrastrutture e dei trasporti, sentito il Ministro dell’interno, sono definiti le modalità attuative e gli strumenti operativi della sperimentazione;
Visto il decreto del Presidente della Repubblica 24 novembre 2001, n. 474, recante: «Regolamento di semplificazione del procedimento di autorizzazione alla circolazione di prova dei veicoli», e, in particolare, l’art. 1, comma 1, che elenca i soggetti autorizzati alla circolazione di prova per i quali non sussiste l’obbligo di munire della carta di circolazione i relativi veicoli;
Visto il decreto del Presidente del Consiglio dei ministri 11 febbraio 2014, n. 72, recante: «Regolamento di organizzazione del Ministero delle infrastrutture e dei trasporti, ai sensi dell’art. 2 del decreto-legge 6 luglio 2012, n. 95, convertito, con modificazioni, dalla legge 7 agosto 2012, n. 135»;
Visto il decreto del Ministro dei lavori pubblici 1° giugno 2001, emanato ai sensi del su indicato art. 13, comma 6, del decreto legislativo n. 285 del 1992, pubblicato nel supplemento ordinario alla Gazzetta Ufficiale n. 5 del 7 gennaio 2002, che definisce le modalità con cui gli enti proprietari delle strade sono tenuti a istituire e tenere aggiornati la cartografia, il catasto delle strade e le loro pertinenze;
Visto il decreto del Ministro delle infrastrutture e dei trasporti, di concerto con il Ministro dell’interno e il Ministro dell’istruzione, dell’università e della ricerca, 1° febbraio 2013, pubblicato nella Gazzetta Ufficiale n. 72 del 26 marzo 2013;
Visto il decreto del Ministro delle infrastrutture e dei trasporti 12 febbraio 2014, n. 44, che adotta il Piano di azione nazionale sui Sistemi intelligenti di trasporto - ITS;
Visto il decreto del Ministro delle infrastrutture e dei trasporti 9 giugno 2015, n. 194, come modificato dal decreto del Ministro delle infrastrutture e dei trasporti 1° luglio 2015, n. 232, con il quale è stata soppressa la Struttura tecnica di missione e, contestualmente, istituita la nuova «Struttura tecnica di missione per l’indirizzo strategico, lo sviluppo delle infrastrutture e l’alta sorveglianza»;
Vista la Comunicazione della Commissione al Consiglio, al Parlamento europeo, al Comitato economico e sociale europeo e al Comitato delle regioni COM(2010)308 del 14 giugno 2010: «Piano d’azione relativo alle applicazioni del sistema globale di radionavigazione via satellite (GNSS)», SEC(2010)716 e SEC(2010)717, che sollecita la diffusione delle applicazioni basate sull’uso del sistema EGNOS e di Galileo in Europa;
Vista la Comunicazione dalla Commissione al Parlamento, al Consiglio, al Comitato economico e sociale europeo e al Comitato delle Regioni COM(2016) 766 del 30 novembre 2016: «Una strategia europea per i sistemi di trasporto intelligenti cooperativi, prima tappa verso una mobilità cooperativa, connessa e automatizzata»;
Vista la dichiarazione sulla cooperazione nel campo della guida autonoma sottoscritta ad Amsterdam il 15 aprile 2016 dai Ministri dei trasporti dell’Unione europea;
Considerato che la diffusione dei sistemi ITS comprende, come parte essenziale, un processo di trasformazione digitale verso infrastrutture viarie tecnologicamente avanzate definite «Start Riad»;
Considerato che la trasformazione digitale verso le «Start Riad» avviene in piena sintonia con i processi di governo e gestione dell’innovazione del settore in atto in Europa, con particolare riferimento alla Piattaforma europea C-ITS e alla iniziativa GEAR 2030;
Premesso che i criteri alla base del processo di trasformazione digitale e le specifiche tecniche e prestazionali sono stati condivisi con i principali portatori di interesse del settore nel corso di un articolato processo partenariato iniziato nel giugno 2016;
Considerato che il processo sopra descritto si articola in coerenza con gli indirizzi e le azioni della strategia «Connettere l’Italia» del Ministero delle infrastrutture e dei trasporti, il cui contenuto è quello dell’allegato Infrastrutture al DEF 2016, approvato in Consiglio dei ministri l’8 aprile 2016, con particolare riferimento alla valorizzazione del patrimonio infrastrutturale esistente e la realizzazione di infrastrutture utili, snelle e condivise;
Ritenuto opportuno applicare il processo di trasformazione digitale almeno alle infrastrutture stradali della rete TEN-T, con riferimento ai livelli core e comprensive, nonché alle nuove infrastrutture o tratte infrastrutturali preesistenti di collegamento tra elementi della rete TENT, estendendolo progressivamente a tutte le infrastrutture appartenenti al Sistema nazionale integrato dei trasporti, SNIT, la cui identificazione effettuata dal Piano generale dei trasporti e della logistica del 2001 è stata adeguata nell’allegato «Connettere l’Italia» al Documento di economia e finanza 2017, deliberato dal Consiglio dei ministri in data 11 aprile 2017, e ad altre infrastrutture di completamento da identificare con successivi atti di questo dicastero;
Considerata la veloce dinamica dell’innovazione nelle tecnologie del settore, che le ricerche e le sperimentazioni internazionali sui veicoli automatizzati rendono reale la possibilità che tali veicoli sono destinati ad essere progressivamente introdotti sui mercati nei prossimi anni e che i governi di vari paesi già indirizzano il processo di ricerca in modo da rendere concreti i potenziali vantaggi di sicurezza ed efficienza del traffico stradale;
Considerato, altresì, che una fase inevitabile del processo di sviluppo delle nuove tecnologie, dopo le prove di laboratorio e in sede protetta, e prima dell’introduzione sul mercato, riguarda le necessarie prove su strada dei veicoli automatizzati;
Considerato che le infrastrutture stradali e i servizi CITS sono destinate a interagire sempre più in futuro con i veicoli ad elevati livelli di automazione e connessione che le percorrono;
Sentito il Ministro dell’interno;
EMANA
il seguente decreto:
Art. 1.
Definizioni
1. Ai fini del presente decreto, si intende per:
a) «TEN-T», Trans-European Network - Transport;
b) «SNIT», Sistema nazionale integrato dei trasporti;
c) «PGTL», Piano generale dei trasporti e della logistica;
d) «C-ITS», Sistema di trasporto intelligente cooperativo, secondo le definizioni della piattaforma europea C-ITS;
e) «BIM», Building Information Modeling, come applicato alle infrastrutture lineari di trasporto:
f) «veicolo a guida automatica», un veicolo dotato di tecnologie capaci di adottare e attuare comportamenti di guida senza l’intervento attivo del guidatore, in determinati ambiti stradali e condizioni esterne. Non è considerato veicolo a guida automatica un veicolo omologato per la circolazione sulle strade pubbliche italiane secondo le regole vigenti e dotato di uno o più sistemi di assistenza alla guida, che vengono attivati da un guidatore al solo scopo di attuare comportamenti di guida da egli stesso decisi e che comunque necessitano di una continua partecipazione attiva da parte del conducente alla attività di guida;
g) «tecnologie di guida automatica», le tecnologie innovative per la guida automatica basate su sensori di vario tipo, software per l’elaborazione dei dati dei sensori e l’interpretazione di situazioni nel traffico, software di apprendimento, software per assumere decisioni di guida e per la loro attuazione, componenti per l’integrazione con il veicolo tradizionale, che rientrano nell’oggetto della sperimentazione su strada di cui al presente decreto;
h) «operatività in modo automatico», la modalità operativa del veicolo a guida automatica in cui le tecnologie di guida automatica sono inserite e assumono il pieno controllo del veicolo;
i) «operatività in modo manuale», la modalità operativa del veicolo a guida automatica in cui le tecnologie di guida automatica sono disinserite e il pieno controllo del veicolo è assunto dal conducente;
j) «supervisore»: l’occupante del veicolo, il quale dovrà essere sempre in grado di assumere il controllo del veicolo indipendentemente dal grado di automazione dello stesso, in qualunque momento se ne presenti la necessità, agendo sui comandi del veicolo in assoluta precedenza sui sistemi automatizzati e che, pertanto, è il responsabile della circolazione del veicolo. Quando ne assuma la guida effettiva, in modalità manuale, assume il ruolo di conducente;
k) «sistema sperimentato», l’insieme del veicolo a guida automatica autorizzato alla sperimentazione, del supervisore e di tutti i sottosistemi che concorrono alla sperimentazione, ivi compresi i sistemi di monitoraggio, registrazione e i sistemi di comunicazione e interazione per il supervisore;
l) «richiedente», il soggetto che chiede l’autorizzazione a sperimentare su strade pubbliche il veicolo a guida automatica;
m) «titolare dell’autorizzazione», è il soggetto a cui è stata rilasciata l’autorizzazione alla sperimentazione su strade pubbliche del veicolo a guida automatica;
n) «soggetto autorizzante», il Ministero delle infrastrutture e dei trasporti che. conformemente alle modalità di cui al presente decreto, rilascia l’autorizzazione alla sperimentazione su strade pubbliche del veicolo a guida automatica;
o) «sistemi cooperativi V2I», sistemi di interazione tra veicoli e infrastruttura capaci di veicolare informazioni e servizi di interesse per la sicurezza e l’efficienza della guida e del traffico;
p) «sistemi cooperativi V2V», sistemi per l’interazione e la collaborazione tra veicoli;
q) «guida connessa», condizione di guida del veicolo in cui lo stesso adotta sistemi cooperativi V2I ovvero V2V;
r) «sperimentazione in sede protetta», sperimentazione del veicolo a guida automatica su infrastrutture non aperte alla pubblica circolazione, quali ad esempio piste di prova, oppure su infrastrutture esplicitamente riservate, all’atto della sperimentazione, ai veicoli a guida automatica;
s) «percorrenza di prova», il numero di chilometri percorsi in precedenti sperimentazioni su strada effettuate come disposto dal presente decreto, ovvero attestati da enti o organismi internazionali o appartenenti ad altri Stati che adottano processi formali di autorizzazione a prove su strada, in sessioni di sperimentazione in sede protetta o in ambienti di simulazione di guida caratterizzati da condizioni di traffico realistiche, certificati come tali con dichiarazione di assunzione di responsabilità da parte di un ingegnere abilitato iscritto al relativo albo professionale.
Art. 2.
Definizione di Smart Road
1. Si definiscono Smart Road le infrastrutture stradali per le quali è compiuto, secondo le specifiche funzionali di cui all’art. 6, comma 1, un processo di trasformazione digitale orientato a introdurre piattaforme di osservazione e monitoraggio del traffico, modelli di elaborazione dei dati e delle informazioni, servizi avanzati ai gestori delle infrastrutture, alla pubblica amministrazione e agli utenti della strada, nel quadro della creazione di un ecosistema tecnologico favorevole all’interoperabilità tra infrastrutture e veicoli di nuova generazione.
2. Il processo di trasformazione digitale di cui al comma 1 è finalizzato:
a) alla conoscenza dei flussi e delle condizioni di deflusso ai fini del miglioramento:
1) della sicurezza stradale e della assistenza al viaggio ed alla guida;
2) della gestione del traffico;
3) della informazione avanzata ai viaggiatori;
4) della resilienza delle reti e della gestione degli scenari ordinari e di intervento;
b) alla sicurezza stradale con la introduzione di soluzioni e servizi innovativi abilitati dalle tecnologie;
c) alla interoperabilità con i veicoli di nuova generazione ed alla messa in esercizio di servizi C-ITS, a partire da quelli denominati «Day-1» dalla piattaforma europea C-ITS.
3. Per le infrastrutture stradali, definite Smart Road ai sensi del comma 1, è, altresì, avviato, secondo le specifiche funzionali di cui all’art. 6, comma 3, un processo di ulteriore adeguamento tecnologico finalizzato a realizzare:
a) una opportuna e moderna modalità di rappresentazione cartografica;
b) metodologie di gestione e verifica dei dati di progetto, costruzione e esercizio delle infrastrutture ispirate ai principi del BIM;
c) sistemi di monitoraggio orientati alla sicurezza strutturale degli elementi critici componenti le infrastrutture stradali.
Art. 3.
Finalità
1. Finalità del presente decreto è promuovere la valorizzazione del patrimonio infrastrutturale esistente, la realizzazione di infrastrutture utili, l’adeguamento tecnologico della rete viaria nazionale coerentemente con il quadro comunitario e internazionale di digitalizzazione delle infrastrutture stradali, anche a supporto di veicoli connessi e con più avanzati livelli di assistenza automatica alla guida, nonché ridurre l’incidentalità stradale e assicurare la continuità con i servizi europei C-ITS.
2. Il Ministero delle infrastrutture e dei trasporti vigila in modo tale che tutti gli interventi relativi alle infrastrutture viarie di nuova costruzione e tutti gli interventi di rinnovo, innovazione tecnologica, costruttiva e funzionale e manutenzione, aventi o meno carattere straordinario, delle infrastrutture viarie esistenti della rete primaria nazionale, si adeguano ai canoni funzionali delle Smart Road, nonché ai relativi canoni implementativi, conformemente a quanto previsto dal presente decreto e dagli atti normativi e applicativi che ne derivano.
Art. 4.
Ambito di applicazione
1. Il processo di trasformazione digitale è applicato alle infrastrutture stradali della TEN-T, core e comprehensive, nonché a nuove infrastrutture di collegamento tra elementi della rete TEN-T, e progressivamente a tutte le infrastrutture appartenenti al primo livello dello SNIT, secondo le tempistiche e le modalità di cui al presente decreto.
2. La identificazione dei livelli SNIT è quella definita dal PGTL del 2001, come adeguata nell’allegato «Connettere l’Italia» al Documento di economia e finanza 2017.
Art. 5.
Classificazione delle Smart Road
1. Le Smart Road sono classificate secondo le tipologie identificate come «I» e «II».
2. Rientrano nella tipologia I le infrastrutture appartenenti alla rete TEN-T, core e comprehensive , e, comunque, tutta la rete autostradale.
3. Rientrano nella tipologia II le infrastrutture appartenenti al livello 1 dello SNIT, di cui all’art. 4, comma 2, e non già classificate come Smart Road di tipo I.
Art. 6.
Specifiche funzionali delle Smart Road
1. Ai sensi dell’art. 2, comma 1, le specifiche funzionali del processo di trasformazione digitale, da soddisfare da parte delle Smart Road, sono individuate al paragrafo 4, Tabella 1, dell’Allegato A «Specifiche funzionali», parte integrante del presente decreto, e sono da implementare in accordo con le Sezioni da A a C, di cui all’Allegato A medesimo.
2. Le specifiche funzionali di cui al comma 1 si applicano alle Smart Road di tipo I e II conformemente a quanto indicato nella Tabella 2 dell’Allegato A.
3. Ai sensi dell’art. 2, comma 3, per le Smart Road di tipo I e di tipo II è inoltre avviato, coerentemente con la necessità di garantire la proporzionalità tra costi sostenuti e benefici ottenibili, un processo di integrazione della rappresentazione cartografica in linea con gli standard e i criteri di interoperabilità vigenti, di realizzazione di una modellistica di tipo BIM, nonché di un sistema di monitoraggio geotecnico e per la sicurezza strutturale come individuato dalla Sezione D dell’Allegato A.
4. Le specifiche funzionali di cui al presente articolo sono soggette ad aggiornamenti e revisioni mediante decreto del Ministro delle infrastrutture e trasporti, su segnalazione e con il supporto tecnico dell’Osservatorio istituito ai sensi dell’art. 20.
Art. 7.
Tempistica e modalità per la implementazione delle specifiche funzionali
1. La implementazione delle caratteristiche funzionali, conformemente a quanto disposto dall’art. 6, si applica a tutte le infrastrutture viarie di nuova realizzazione, ovvero oggetto di potenziamento, per le quali non è stato ancora approvato alla data di entrata in vigore del presente decreto il progetto preliminare, e rientranti negli ambiti di applicazione di cui all’art. 4.
2. La implementazione delle specifiche funzionali, conformemente a quanto disposto dall’art. 6, si applica anche alle infrastrutture esistenti rientranti negli ambiti di applicazione di cui all’art. 4, qualora siano oggetto di interventi di innovazione tecnologica, costruttiva o funzionale.
3. Le specifiche funzionali per l’adeguamento tecnologico di tratte e infrastrutture stradali esistenti rientranti negli ambiti di applicazione di cui all’art. 4, anche in assenza di interventi di cui al comma 2 del presente articolo, si applicano conformemente a quanto disposto dall’art. 6, secondo la tempistica individuata dalla Tabella 2 del paragrafo 4 delle «Specifiche funzionali» di cui all’Allegato A.
4. La tempistica di cui al comma 3 è obbligatoriamente tenuta in considerazione in qualsiasi atto o accordo nuovo o di rinnovo o di proroga o di conferma riferibile alle convenzioni o concessioni che regolano, a qualsiasi titolo, le infrastrutture viarie in concessione o gestite mediante concessione o contratto di servizio.
Art. 8.
Costi per la implementazione delle specifiche funzionali
1. I costi relativi alla implementazione delle specifiche funzionali di cui all’art. 6 sono a carico del concessionario della infrastruttura, del concessionario di servizio o, in mancanza delle precedenti figure, dell’ente a diverso titolo gestore, e sono da considerarsi quali costi di investimento, riconosciuti a richiesta e secondo le normative e modalità vigenti, a valere sulle relative convenzioni, concessioni o concessioni di servizio.
2. I costi di manutenzione ricorrente e gestione direttamente connessi alla implementazione di cui al comma 1 possono essere a loro volta riconosciuti, ove ammissibili e documentati, secondo le modalità del medesimo comma 1.
3. Gli investimenti tecnologici realizzati in difformità alle specifiche, agli ambiti e alle modalità e tempistiche fissate dal presente decreto possono essere riconosciuti ed esplicitamente accettati solo su richiesta dell’interessato, previa adeguata e dettagliata giustificazione delle difformità e dei loro motivi.
Art. 9.
Autorizzazione alla sperimentazione di veicoli a guida automatica
1. La sperimentazione su strade pubbliche di veicoli a guida automatica è autorizzata dal Ministero delle infrastrutture e dei trasporti - Dipartimento per i trasporti, la navigazione, gli affari generali e il personale – Direzione generale per la motorizzazione.
2. L’autorizzazione di cui al comma 1 può essere chiesta, singolarmente o in maniera congiunta, dal costruttore del veicolo equipaggiato con le tecnologie di guida automatica, nonché dagli istituti universitari e dagli enti pubblici e privati di ricerca che conducono sperimentazioni su veicoli equipaggiati con le tecnologie di automazione della guida.
3. L’autorizzazione può essere rilasciata con riferimento unicamente a veicoli che siano già stati omologati, nella versione priva delle tecnologie di guida automatica, secondo la normativa vigente. Rimane impregiudicata la facoltà per le fabbriche costruttrici di veicoli a motore e di rimorchi, loro rappresentanti, concessionari e commissionari, per i costruttori delle tecnologie di guida automatica, nonché per gli istituti universitari e gli enti pubblici e privati di ricerca che conducono sperimentazioni su veicoli di effettuare prove di validazione su strada di un nuovo modello precedenti l’avvio della produzione in serie, ai sensi del decreto del Presidente della Repubblica 24 novembre 2001, n. 474.
4. L’autorizzazione è rilasciata per uno o più veicoli, con riferimento a ciascuno dei quali è indicato il proprietario, appartenenti alla stessa classe e categoria ai sensi dell’art. 47 del codice della strada, dotati di tecnologie di guida automatica appartenenti ad una famiglia omogenea con prestazioni funzionali simili e in grado di garantire un identico livello di sicurezza su strada, eventualmente anche in diverse versioni. A seguito della autorizzazione, i veicoli sono iscritti in un apposito registro tenuto dal soggetto autorizzante e ricevono in dotazione un contrassegno speciale di autorizzazione alla sperimentazione, le cui caratteristiche sono stabilite nell’Allegato B, parte integrante del presente decreto, che deve essere esposto sia sul lato anteriore sia su quello posteriore del veicolo durante l’attività sperimentale.
5. I veicoli autorizzati alla sperimentazione circolano, durante l’attività sperimentale, con targa di prova rilasciata ai sensi del decreto del Presidente della Repubblica n. 474 del 2001.
6. L’autorizzazione si riferisce alla esecuzione delle sperimentazioni su uno o più ambiti stradali e, per ciascuno di essi, per le specifiche infrastrutture stradali indicate dal soggetto richiedente dopo avere ottenuto il nulla osta dall’ente proprietario della strada.
Art. 10.
Supervisore del veicolo a guida automatica durante la sperimentazione
1. La conduzione su strada del veicolo automatizzato durante la sperimentazione è effettuata da un supervisore che possiede da almeno cinque anni la patente di guida per la classe del veicolo in prova, ha superato con successo un corso di guida sicura o un corso specifico per sperimentatori di veicoli a guida automatica presso un ente accreditato in uno dei Paesi dell’Unione europea, ha condotto prove su veicoli a guida automatica in sede protetta o su strada pubblica, anche all’estero, purché in uno Stato in cui la sperimentazione dei veicoli a guida automatica è regolamentata, per una percorrenza di almeno mille chilometri e possiede le conoscenze necessarie, adeguatamente documentate, per prendere parte alle prove in veste di supervisore.
2. Il supervisore deve essere in grado di commutare tempestivamente tra operatività del veicolo in modo automatico e operatività dello stesso in modo manuale e viceversa. Il supervisore ha la responsabilità del veicolo in entrambe le modalità operative.
Art. 11.
Domanda di autorizzazione alla sperimentazione
1. Il costruttore del veicolo equipaggiato con le tecnologie di guida automatica, nonché gli istituti universitari e gli enti pubblici e privati di ricerca che conducono sperimentazioni su veicoli equipaggiati con le tecnologie di automazione della guida presentano la domanda di autorizzazione alla sperimentazione su strada del veicolo a guida automatica al Ministero delle infrastrutture e dei trasporti - Dipartimento per i trasporti, la navigazione, gli affari generali e il personale - Direzione generale per la motorizzazione, che contiene:
a) l’indicazione del proprietario del veicolo a guida automatica, quale soggetto responsabile ai sensi dell’art. 196 del codice della strada e dell’art. 2054, comma 3, del codice civile, ovvero di altro soggetto obbligato n solido, ai sensi del citato art. 196;
b) l’indicazione degli ambiti stradali per cui la domanda è presentata e, per ciascun ambito, delle tratte infrastrutturali sulle quali si intende condurre la sperimentazione;
c) il richiedente può proporre, successivamente alla domanda, l’estensione degli ambiti di cui al punto a), indicando le tratte infrastrutturali, per tipologia, per le quali richiede l’estensione e i motivi della estensione;
d) la documentazione che dimostra di aver ottenuto dall’Ente proprietario della strada, per ciascuna tratta infrastrutturale proposta, il nulla osta a condurre le prove sperimentali, anche in caso di richiesta di estensione successiva alla domanda di cui al punto b);
e) l’indicazione, per ciascun ambito stradale proposto, delle condizioni esterne, metereologiche e di visibilità e delle condizioni delle strade e del traffico in cui le prove possono essere effettuate e che il veicolo a guida automatica gestisce.
2. La dichiarazione, comprovata dalla necessaria documentazione allegata alla domanda, attesta, sotto la responsabilità del richiedente:
a) la maturità delle tecnologie oggetto di sperimentazione in riferimento agli ambiti stradali per cui si richiede l’autorizzazione;
b) la descrizione del know-how derivante dai fornitori dei componenti; del processo di test implementato; delle prove svolte in simulazione evidenziando la copertura degli scenari di applicazione e le deviazioni dagli scenari applicativi reali quali il numero di attori coinvolti e le deviazioni del sistema in ambiente simulato rispetto all’ambiente reale quali i sensori non reali ma modellati; delle prove svolte su pista, evidenziando le deviazioni rispetto agli scenari applicativi reali;
c) di avere già effettuato sperimentazioni con veicoli a guida automatica, anche diversi da quello per il quale si richiede l’autorizzazione, in laboratorio in simulazione, eventualmente mediante simulatori di guida, ovvero in sede protetta, per una percorrenza di almeno tremila chilometri, nonché sperimentazioni in laboratorio e sede protetta o su strade pubbliche anche all’estero, purché in uno Stato in cui la sperimentazione dei veicoli a guida automatica è regolamentata, per l’insieme dei veicoli omogenei oggetto dell’autorizzazione per almeno tremila chilometri ulteriori. Le sperimentazioni già effettuate e le soglie chilometriche indicate sono riferite ad ognuno degli ambiti stradali per cui si richiede il rilascio dell’autorizzazione, in condizioni di traffico realistiche, inclusa l’interazione con altri veicoli o gli altri soggetti normalmente presenti nell’ambito stradale. Eventuali incidenti ovvero anomalie avvenute durante sperimentazioni già effettuate, anche in laboratorio ovvero sede protetta, sono riportati e descritti;
d) la capacità del veicolo, in modalità di guida automatica, di gestire le situazioni prevedibili negli scenari di guida tipici degli ambiti stradali e delle condizioni esterne per cui viene chiesto il permesso. In particolare, la documentazione deve evidenziare i metodi di gestione delle particolarità degli scenari, includendo sistemi di controllo del traffico quali rotonde, semafori, segnali, attraversamenti pedonali, lavori in corso; pedoni e oggetti inclusi biciclette, animali, ostacoli, coni; se previsti tra le condizioni esterne per cui è fatta richiesta, tipi di ambiente quali pioggia, neve, ghiaccio, nebbia, polvere, notte; interazioni con veicoli di emergenza, quali pompieri, ambulanze, polizia;
e) la idoneità del veicolo, in modalità di guida automatica, per ognuno degli ambiti stradali e delle condizioni esterne per cui si richiede il rilascio dell’autorizzazione, ad attuare una reazione adeguata con riferimento agli scenari di guida tipici di ciascun ambito e, quando non possibile, la possibilità del supervisore del veicolo automatizzato di intervenire tempestivamente e mantenere il veicolo in condizioni di sicurezza in ogni momento nel corso dell’intera durata dell’attività di sperimentazione; particolare attenzione deve essere prestata ad eventuali funzionalità che consentono di viaggiare sincronizzati in convoglio, mantenendo distanze ridotte tra i veicoli, per dimostrarne la sicurezza;
f) la descrizione della tecnologia utilizzata per il veicolo autonomo; nel caso in cui la richiesta si riferisce a più versioni delle tecnologie di guida automatica, deve essere analiticamente descritto l’impatto delle diverse versioni sulle prestazioni e sulle funzionalità rilevanti, con particolare riferimento alla sicurezza;
g) la descrizione delle protezioni di sicurezza intrinseca atte a scongiurare gli accessi non autorizzati ai sistemi di guida automatica;
h) l’analisi dei rischi associati all’utilizzo del veicolo in modalità di guida automatica nella circolazione su strada, la descrizione delle contromisure adottate e i piani di sicurezza per le prove;
i) l’elenco dei conducenti del veicolo a guida automatica e la documentazione della formazione effettuata, atta a garantire che i conducenti siano a conoscenza del comportamento del veicolo e siano in grado di gestire eventuali situazioni di pericolo, dovute a cause esterne o a limiti di funzionamento o malfunzionamento delle tecnologie in prova;
j) l’elenco dei veicoli a guida automatica da sottoporre a sperimentazione, singolarmente identificati, con l’indicazione delle diverse versioni tecnologiche applicate a ciascun veicolo.
Art. 12.
Caratteristiche dei sistemi di guida automatica ai fini dell’ammissione alla sperimentazione su strade pubbliche
1. Ai fini dell’autorizzazione alle prove su strade pubbliche, il sistema di guida automatica oggetto di sperimentazione deve:
a) garantire, in ogni condizione, il rispetto delle norme di cui al Titolo V del codice della strada e, in generale, operare in modo da non costituire pericolo o intralcio per la circolazione;
b) essere in grado di interagire in sicurezza con tutti i possibili utenti della strada, nell’ambito stradale oggetto dell’autorizzazione, inclusi gli utenti più deboli e vulnerabili quali persone a mobilità ridotta o con disabilità, bambini, pedoni, ciclisti e motociclisti;
c) essere idoneo in ogni momento a consentire il passaggio in modo semplice ed immediato dalla modalità automatica alla modalità manuale, su azione del supervisore del veicolo automatizzato. La transizione deve avvenire con modalità e in tempi tali da permettere il buon esito dell’intervento del supervisore. Tale idoneità è documentata nella domanda di autorizzazione;
d) essere dotato di protezioni intrinseche di sicurezza atte a garantire l’integrità dei dati e la sicurezza delle comunicazioni e tali da scongiurare accessi non autorizzati e, in ogni caso, da vanificarne gli effetti dannosi o pericolosi;
e) essere in grado, per tutta la durata delle prove, di registrare dati dettagliati con frequenza almeno pari a dieci hertz e tali da includere almeno:
1) tempo trascorso dall’inizio della registrazione, coincidente con l’inizio della sperimentazione;
2) modo di operazione corrente automatico o manuale;
3) data, ora, posizione in coordinate WGS84 e velocità istantanea;
4) accelerazione istantanea;
5) distanza percorsa dall’inizio della sperimentazione;
6) attivazione comandi per la dinamica laterale del veicolo;
7) attivazione comandi per la dinamica longitudinale del veicolo;
8) numero di giri al minuto del motore, o altro indicatore equivalente;
9) rapporto di marcia innestato, o altro indicatore equivalente;
10) valore corrente dell’angolo di imbardata, rollio e beccheggio;
11) utilizzo dei dispositivi di illuminazione e di segnalazione visiva e acustica;
12) dati acquisiti dei sensori facenti parte del sistema oggetto delle prove;
13) eventuali messaggi V2V e V2I ricevuti e trasmessi.
Art. 13.
Ambiti stradali
1. L’autorizzazione alle prove su strada può essere richiesta con riferimento a uno o più dei seguenti ambiti stradali, classificati secondo la tipologia di cui all’art. 2, comma 2, del codice della strada:
a) autostrade e strade extraurbane principali, tipo A e B, caratterizzate da:
1) possibilità di frenate e manovre ad alte velocità;
2) possibili lavori in corso;
3) presenza infrequente di pedoni e oggetti sul manto stradale;
4) accesso controllato e limitato a rampe;
5) possibili condizioni deflusso instabile;
b) strade extraurbane secondarie, tipo C, caratterizzate da:
1) possibili lavori in corso;
2) presenza di cicli, motocicli, pedoni, animali;
3) sistemi di controllo del traffico, quali rotonde o semafori;
4) possibili condizioni di traffico caratterizzato da deflusso instabile, possibilità di formazione di code alle intersezioni ed altri fenomeni dovuti a condizioni di deflusso in saturazione;
5) accessi non controllati;
c) ambiente urbano e ultimo miglio, tipo D, E e F, caratterizzate da:
1. possibili lavori in corso, oggetti ovvero ostacoli sul manto stradale;
2. presenza di cicli, motocicli, pedoni, animali;
3. sistemi di controllo del traffico, quali rotonde o semafori;
4. fenomeni di code, di disturbo al deflusso dovuto ad attività a bordo strada, di condizioni di deflusso saturo e sovrasaturo, di interferenza con manovre di parcheggio, di parcheggio in doppia fila;
5. accessi non controllati;
6. regolatori di velocità e zone a velocità controllata, quali le Zone 30;
7. zone a traffico limitato e zone pedonali;
8. aree adibite a parcheggio;
9. intersezioni non semaforizzate;
10. strade non asfaltate.
Art. 14.
Adempimenti istruttori da parte del soggetto autorizzante
1. Il soggetto autorizzante può richiedere ogni documentazione ritenuta utile ai fini dell’istruttoria per il rilascio dell’autorizzazione. Se lo considera opportuno, e in ogni caso se il soggetto richiedente non ha documentato percorrenze di prova per un totale superiore ai diecimila chilometri pertinenti agli ambiti stradali oggetto della domanda, sono presentati i risultati di prove eseguite in laboratorio, in ambiente di prova controllato o con l’utilizzo di piattaforme software, che descrivono le logiche di reazione ed attuazione automatica, o di intervento da parte del supervisore, in casi di pericolo imminente. Tali logiche devono coprire i più ricorrenti scenari di rischio per ogni ambito stradale per cui si richiede autorizzazione ed i risultati devono contenere una stima degli esiti previsti, ovvero simulati, dell’attuazione delle logiche di reazione. Detti risultati sono validati da ente o organismo certificato. Nei casi in cui la domanda è presentata da un soggetto diverso dal costruttore, il richiedente presenta il nulla osta alla sperimentazione rilasciato dal costruttore del veicolo.
2. Sulle richieste di sperimentazione presentate è acquisito il parere dell’Osservatorio tecnico di supporto per le Smart Road e per il veicolo connesso e a guida automatica di cui all’art. 20.
Art. 15.
Contenuto e durata dell’autorizzazione
1. L’autorizzazione alla sperimentazione su strada, copia della quale deve essere conservata a bordo del veicolo e deve essere esibita a richiesta degli organi di polizia stradale in caso di controllo, indica:
a) l’elenco dei veicoli a guida automatica autorizzati alle prove, con l’individuazione del rispettivo proprietario, identificati mediante numero di telaio; nel caso di prove di validazione su strada che non facciano uso di un veicolo omologato e impieghino un nuovo modello precedente l’avvio della produzione in serie, sarà cura del richiedente apporre un numero di telaio specifico seguendo gli stessi criteri utilizzati per i veicoli di normale produzione;
b) gli ambiti stradali e le relative condizioni meteorologiche, di visibilità, di strada e traffico, in cui ciascun veicolo autonomo potrà circolare, con l’indicazione, per ogni ambito, delle tratte infrastrutturali ammesse e delle eventuali limitazioni temporali con riferimento a determinati periodi o giorni dell’anno;
c) l’elenco nominativo dei conducenti del veicolo automatizzato ammessi allo svolgimento delle prove su strada.
2. L’autorizzazione di cui al comma 1 ha la durata di un anno e può essere rinnovata a richiesta del titolare dell’autorizzazione. Alla richiesta di rinnovo, da presentare con anticipo di almeno trenta giorni rispetto alla scadenza dell’autorizzazione, il richiedente deve allegare:
a) il rapporto sulle sperimentazioni effettuate, per il periodo decorso fino a trenta giorni prima della presentazione;
b) il contratto di assicurazione per il nuovo periodo, rispondente ai requisiti di cui all’art. 19, con entrata in vigore condizionata al rinnovo dell’autorizzazione;
c) l’aggiornamento della descrizione delle tecnologie e delle prestazioni del veicolo;
d) l’eventuale richiesta di estensione a nuovi ambiti stradali e a nuove infrastrutture, ovvero a nuove condizioni esterne, documentando, tramite il relativo nullaosta, la disponibilità dell’Ente proprietario;
e) l’elenco aggiornato dei veicoli a guida automatica e dei conducenti.
3. Durante il periodo di validità l’autorizzazione può essere estesa, a richiesta motivata del titolare dell’autorizzazione, qualora si renda necessario integrare la sperimentazione con nuovi veicoli, nuovi conducenti, nuove tratte infrastrutturali o condizioni esterne. In questi casi il titolare presenta la documentazione prevista all’art. 11 per i soli elementi aggiuntivi.
Art. 16.
Obblighi del titolare della autorizzazione alla sperimentazione
1. Il titolare dell’autorizzazione alla sperimentazione su strada ha l’obbligo di:
a) assicurare che le sperimentazioni sono effettuate nel rispetto dei vincoli posti dall’autorizzazione;
b) assicurare che i dati delle prove, come specificati in seguito e all’art. 12, comma 1, lettera e) , sono correttamente rilevati e tenuti a disposizione del soggetto autorizzante, che potrà richiederne la visione o la trasmissione per tutta la durata dell’autorizzazione e per i dodici mesi successivi;
c) assicurare che il sistema sperimentato è nelle condizioni adatte alle prove e che i successivi aggiornamenti delle tecnologie rispettano le condizioni di sicurezza, almeno ai livelli documentati nella domanda per l’autorizzazione;
d) assicurare che i conducenti sono nelle condizioni adatte alle prove, verificandone le effettive capacità e assicurando con opportune procedure interne che le prove sono di durata e complessità tali da evitare l’affaticamento dei conducenti;
e) informare il gestore delle tratte infrastrutturali, indicato nell’autorizzazione, delle prove sperimentali previste. Il programma delle prove, da inviare con anticipo di dieci giorni rispetto all’inizio delle sessioni di prova al gestore e in copia al soggetto autorizzante, contiene l’elenco delle prove previste nella sessione per ogni infrastruttura, con il dettaglio dei veicoli interessati.
2. Il titolare dell’autorizzazione, per tutta la durata dell’autorizzazione, è tenuto a produrre e consegnare al soggetto autorizzante:
a) il rapporto puntuale su eventi o problematiche di qualsiasi natura che hanno coinvolto il sistema sperimentato e che possono avere risvolti ai fini della sicurezza anche solo potenziali, da consegnare entro quindici giorni dall’evento, che deve contenere:
1) una descrizione dettagliata dell’evento;
2) l’estratto dei dati obbligatoriamente registrati dal veicolo, per un congruo periodo antecedente e successivo all’evento;
3) ogni altro dato registrato dal veicolo, incluse eventuali riprese video, per lo stesso periodo di tempo;
b) il rapporto annuale sulle sperimentazioni effettuate, da consegnare entro trenta giorni dal termine dell’autorizzazione, che include l’elenco delle sperimentazioni effettuate, indicando per ciascuna sperimentazione:
1) la tratta infrastrutturale utilizzata;
2) le condizioni esterne durante la sperimentazione;
3) i chilometri percorsi in modo automatico;
4) i riferimenti a possibili eventi o problematiche verificatesi;
5) il numero di transizioni dallo stato di operatività automatica allo stato di operatività manuale e, per ogni transizione, l’indicazione della località e della causa, quale malfunzionamento, stato della strada, avverse condizioni meteo, lavori stradali, emergenze, incidenti o collisioni, anomalie del traffico, difficoltà di riconoscere situazioni complesse.
Art. 17.
Disponibilità dei gestori stradali e relativi obblighi
1. I gestori delle tratte stradali interessate alla sperimentazione, sulla base della richiesta del richiedente l’autorizzazione, rilasciano espresso nulla osta a consentire che in specifiche tratte delle infrastrutture dagli stessi gestite possono avere luogo sperimentazioni su strada di veicoli a guida automatica.
2. I gestori delle tratte stradali interessate alla sperimentazione:
a) informano tempestivamente il titolare dell’autorizzazione di eventuali condizioni anomale dell’infrastruttura nei giorni citati nel programma delle sessioni di prova;
b) assicurano, se l’infrastruttura è dotata di sistemi cooperativi V2I, che tali sistemi e i relativi servizi possono essere utilizzati dal titolare dell’autorizzazione durante le prove e che i dati eventualmente raccolti sono a disposizione del titolare stesso;
c) divulgano, attraverso i loro canali di comunicazione ufficiale e segnaletica in loco, anche mediante l’utilizzo di pannelli a messaggio variabile, informazioni all’utenza sulle possibili sperimentazioni.
Art. 18.
Sospensione e revoca dell’autorizzazione
1. Il soggetto autorizzante può sospendere o revocare l’autorizzazione se ravvisa, anche a seguito di inadempienze del soggetto autorizzato e di segnalazioni relative a quanto emerso in sede di controlli su strada, che il proseguimento delle sperimentazioni può causare un rischio per la sicurezza della circolazione. Nei casi in cui emergono inadempienze, violazioni e in caso di incidente stradale, l’organo di polizia intervenuto effettua una segnalazione circostanziata all’ente autorizzante.
Art. 19.
Assicurazione della responsabilità civile
1. Il richiedente deve dimostrare di avere concluso il contratto di assicurazione per responsabilità civile specifica per il veicolo a guida automatica, ai sensi della legge 24 dicembre 1969, n. 990, depositando una copia presso il soggetto autorizzante, con un massimale minimo pari a quattro volte quello previsto per il veicolo utilizzato per la sperimentazione nella sua versione priva delle tecnologie di guida automatica, secondo la normativa vigente.
2. Il contratto di assicurazione indica espressamente che l’assicuratore è a conoscenza delle modalità di uso del veicolo e che il veicolo è utilizzato in modalità operativa automatica su strade pubbliche.
Art. 20.
Osservatorio per le Smart Road ed i veicoli connessi e a guida automatica
1. Al fine di favorire il processo di trasformazione digitale verso le Smart Road e le attività finalizzate alla sperimentazione ed allo sviluppo dei veicoli connessi e a guida automatica, presso la Direzione generale per i sistemi informativi e statistici del Ministero delle infrastrutture e dei trasporti è istituito l’«Osservatorio tecnico di supporto per le Smart Road e per il veicolo connesso e a guida automatica», di seguito Osservatorio.
2. L’Osservatorio è presieduto dal direttore della Direzione generale di cui al comma 1 ed è composto dai direttori delle Direzioni generali per la motorizzazione, per la sicurezza stradale, per le strade e le autostrade e per la vigilanza e la sicurezza nelle infrastrutture stradali, per la vigilanza sulle concessionarie autostradali, da due rappresentanti della Struttura tecnica di missione per l’indirizzo strategico, lo sviluppo delle infrastrutture e l’alta sorveglianza, nonché da un rappresentante del Mistero dell’interno.
3. L’Osservatorio può avvalersi del supporto della Struttura tecnica di missione per l’indirizzo strategico, lo sviluppo delle infrastrutture e l’alta sorveglianza e, ai fini della espressione del parere in merito alle domande di sperimentazione trasmesse dalla Direzione generale per la motorizzazione, può avvalersi del supporto di enti o organismi certificati.
4. Con apposito provvedimento del direttore della Direzione generale di cui al comma 1, da adottarsi nel termine di sessanta giorni dalla data di entrata in vigore del presente decreto, sentite le direzioni generali facenti parte dell’Osservatorio, e da pubblicarsi sul sito web del Ministero delle infrastrutture e dei trasporti, sono disciplinati l’organizzazione e il funzionamento dell’Osservatorio.
5. Il decreto di cui al comma 4 definisce il logo ufficiale con il quale è possibile identificare le infrastrutture viarie che abbiano assunto la qualifica di Smart Road.
6. I compiti operativi dell’Osservatorio sono:
a) studiare e promuovere l’adozione di strumenti metodologici ed operativi per monitorare, con idonee analisi ex ante ed ex post , gli impatti del processo di digitalizzazione delle infrastrutture viarie e della sperimentazione su strada di veicoli autonomi;
b) esaminare ed esprimere parere in merito alle richieste di autorizzazione per la sperimentazione di veicoli a guida autonoma trasmesse dalla Direzione generale per la motorizzazione;
c) verificare l’avanzamento del processo di trasformazione digitale verso le Smart Road, l’adesione dei portatori di interesse, l’efficacia e l’adeguatezza della normativa, la rispondenza alle norme tecniche degli interventi sulle infrastrutture;
d) studiare e predisporre gli adeguamenti e le revisioni delle «Specifiche funzionali» per le Smart Road di cui all’art. 6, nonché studiare e predisporre gli adeguamenti delle caratteristiche dei sistemi ai fini della sperimentazione su strade pubbliche di cui all’art. 12, coinvolgendo negli studi i portatori di interesse nazionali, seguendo gli orientamenti comunitari e considerando anche le specifiche funzionali già implementate sulla rete viaria nazionale, nonché i criteri di efficienza dei costi ed evoluzione dell’equipaggiamento tecnologico del parco veicolare circolante;
e) predisporre studi di fattibilità per l’individuazione dei criteri di integrazione e degli attributi delle rappresentazioni cartografiche di riferimento per le Smart Road, e attivare la relativa realizzazione, in linea con gli standard e i criteri di interoperabilità vigenti, e in conformità con la Sezione D.1 dell’Allegato A e successivi aggiornamenti;
f) predisporre studi di fattibilità e guidare l’attivazione di eventuali processi realizzativi finalizzati alla implementazione di una piattaforma nazionale di supporto alla erogazione di servizi C-ITS;
g) favorire una estesa e approfondita discussione nazionale, in sinergia con i tavoli di confronto internazionali, tesa a formare un consenso informato in preparazione della formulazione della normativa, sui temi di interesse generale, tra i quali:
1) i temi etici e legali legati all’introduzione dei veicoli a guida automatica;
2) i temi riguardanti i veicoli connessi e cooperativi, quali la proprietà dei dati, i modelli di circolazione e l’uso efficace dei dati, la privacy e la riservatezza, la protezione di un mercato concorrenziale;
3) la sicurezza dei sistemi automatizzati e connessi;
4) la definizione di un piano nazionale a breve e medio termine, che individua e definisce gli interventi di supporto necessari a garantire l’efficacia dell’iniziativa Smart Road, quali la creazione di banche dati nazionali cartografici, di piattaforme condivise per l’utilizzo efficiente dei dati provenienti dai veicoli cooperativi, di strumenti di supporto e monitoraggio per i veicoli a guida automatica;
h) promuovere, coordinare e supportare, da un punto di vista tecnico e delle competenze, la partecipazione delle istituzioni rappresentative del Paese ai tavoli di discussione, normazione e programmazione internazionali;
i) individuare e riconoscere laboratori e infrastrutture di ricerca pubblici, privati o misti con funzioni di servizio allo sviluppo ed innovazione nel campo delle Smart Road e dei veicoli connessi e a guida automatica, nonché promuoverne l’istituzione e coordinarne l’azione.
6. L’Osservatorio cura la tenuta e l’aggiornamento dell’elenco delle infrastrutture viarie che, ai sensi dell’art. 2, comma 1, assumono la qualifica di Smart Road, verificando il rispetto delle specifiche funzionali di cui all’art. 6, comma 1. L’inclusione nell’elenco avviene su domanda dell’Ente proprietario della infrastruttura interessata e a seguito dell’esito positivo della relativa istruttoria. Dal momento della inclusione nell’elenco, l’infrastruttura viaria può fregiarsi del logo identificativo di Smart Road di cui al comma 5.
7. Per la partecipazione alle attività dell’Osservatorio non sono dovuti compensi, gettoni, emolumenti, indennità o rimborsi di spese comunque denominati.
Il presente decreto sarà inviato agli organi di controllo per la registrazione e pubblicato nella Gazzetta Ufficiale della Repubblica italiana.
Roma, 28 febbraio 2018
Il Ministro: DELRIO
Allegato A al Decreto del 28/02/2018
SPECIFICHE FUNZIONALI
SMART ROAD
Tavola degli Acronimi
| SG | Fifth generation (tecnologie di quinta generazione per la telefonia cellulare) |
| ARPA | Agenzia Regionale per l'Ambiente |
| C-ITS | Cooperative Intelligent Transportation Systems |
| CCISS | Centro Coordinamento Informazioni Sicurezza Stradale |
| CEN | Comitato Europeo di Normazione |
| CNR | Consiglio Nazionale delle Ricerche |
| DBMS | DataBase Management System |
| DIL | Driver In the Loop |
| ETSI | European Telecommunications Standard Institute |
| FCD | Floating Car Data |
| GDF | Geographic Data File |
| INSPIRE | Infrastructure for Spatial Information in Europe |
| IoT | Internet of Things |
| IPIT | Indice Pubblico delle informazioni sulle Infrastrutture e sul Traffico |
| ITS | Intelligent Transportation Systems |
| LTE | Long Term Evolution (standard di telefonia mobile cellulare) |
| MAC | Media Access Control (tipicamente MAC-Address) |
| MIT | Ministero delle Infrastrutture e Trasporti |
| OBDL | Open DataBase License |
| OBU | On-board Unit |
| OEM | Original Equipment Manufacturer |
| OSM | Open Street Map |
| PCN | Portale Cartografico Nazionale |
| PGTL | Piano Generale dei Trasporti e della Logistica |
| RSU | Road-side Unit |
| RWIS | Road Weather Information System |
| SNIT | Sistema Nazionale Integrato Trasporti |
| TEN-T | Trans-European Network - Transport |
| TMC | Traffic Management Center |
| TMC - RDS | Traffic Message Channel (on) Radio Data System |
| UNI | Ente Nazionale di Unificazione (organismo nazionale di standardizzazione) |
| V2I | Vehicle To Infrastructure (Communication) |
| V2V | Vehicle To Vehicle (Communication) |
| V2X | Vehicle to Everything (Communication), X può stare per V=Vehicle, I=Infrastructure, P=Pedestrian, D=Device, G=Grid |
| VV.F. | Vigili del Fuoco |
Sommario
1 Obiettivi
2 Il processo di coinvolgimento degli stakeholder
3 Definizione della Smart Road ed ambito di applicazione
4 Specifiche funzionali delle Smart Road
5 Sostenibilità energetica
Sezione A - Rilievo del traffico e delle condizioni di deflusso
A.1. Rilievo del traffico
A.1.1 Rilievo dei transiti ad una sezione
A.1.2 Rilievo del rispetto dei limiti di velocità e per l'enforcement
A.1.3 Rilievo dei dati di tragitto
A.2 Registrazione dei dati in centrale, archiviazione e storicizzazione
A.2.1 Aggregazione in dati correnti dei rilievi di transito ad una sezione
A.2.2 Aggregazione in dati correnti di rilievi del rispetto dei limiti di velocità (enforcement)
A.2.3 Elaborazione e Aggregazione in dati correnti di rilievi di dati di tragitto
A.2.4 Storicizzazione di rilievi di transito ad una sezione
A.2.5 Storicizzazione di rilievi del rispetto dei limiti di velocità (enforcement)
A.2.6 Storicizzazione di rilievi di dati di tragitto
A.3 Modelli di previsione a breve termine
A.4 Modelli di previsione su periodi di tempo omogenei successivi
A.5 Qualità delle misure
Sezione B - Monitoraggio idro/meteo
B.1 Densità dei dati
B.2 Qualità ed integrità dei dati
B.3 Integrabilità con dati da reti esistenti
B.4 Utilizzo di dati da sensori a basso costo o multifunzione
B.5 Integrabilità con dati crowdsourced
B.6 Conservazione ed elaborazione dei dati
Sezione C - Servizi avanzati di tipo ITS
C.1 Introduzione
C.2 Sistemi di informazione e gestione
C.2.1 Supporto per i gestori di infrastrutture
C.3 Servizi avanzati di tipo C-ITS
C.3.1 I servizi
Sezione D - Indirizzi per la sperimentazione di ulteriori soluzioni
D.1 Grafi, rappresentazioni, informazioni statiche e dinamiche
D.1.1 Grafo trasportistico e basi cartografiche associate
D.1.2 Caratteristiche statiche delle infrastrutture
D.1.3 Caratteristiche dinamiche delle infrastrutture
D.2 Monitoraggio geotecnico e strutturale
D.2.1 Caratteristiche di sicurezza statica delle strutture
D.2.2 Elaborazione e Aggregazione delle misure
D.3 Modello digitale delle infrastrutture (strumenti BIM)
1 Obiettivi
Le Smart Road sono un insieme di infrastrutture stradali, piattaforme tecnologiche e servizi che puntano agli obiettivi fondamentali della riduzione della incidentalità stradale, della interoperabilità con i veicoli di nuova generazione, della continuità con i servizi europei C-ITS, dello snellimento del traffico, della sostenibilità, della efficienza e della resilienza delle reti. Esse realizzano quindi un necessario e urgente miglioramento della rete nazionale di trasporto, in grado di renderla adeguata alle sfide antropiche e naturali tradizionali, intervenute e prevedibili.
Le Smart Road si realizzano attraverso un processo graduale di digital transformation della rete stradale esistente ed attraverso l’applicazione degli stessi requisiti alla base della digital transformation alle nuove infrastrutture viarie progettate e realizzate in Italia secondo specifiche priorità applicative.
Il processo di digital transformation si pone l’obiettivo di avviare urgentemente la realizzazione di una rete di Smart Road estesa e connessa e si declina attraverso gli strumenti essenziali dell’innovazione, dell’integrazione e dell’inclusione di tecnologie e servizi. Il processo di digital transformation si articola in coerenza con gli indirizzi e le azioni della strategia Connettere l’Italia e in particolare con la valorizzazione del patrimonio infrastrutturale esistente e la realizzazione di infrastrutture utili, snelle e condivise, supportando il raggiungimento degli obiettivi della globalizzazione dei traffici, della valorizzazione del turismo e del rilancio della industria italiana.
Il processo di digital transformation verso le Smart Roads avviene altresì in piena sintonia con i processi di governo e gestione dell’innovazione del settore in atto in Europa, con particolare riferimento alla Piattaforma europea C-ITS e alla iniziativa GEAR 2030. Il processo verso le Smart Road, infatti, si intreccia con gli sviluppi in atto nel settore della cooperazione tra veicoli ed infrastrutture di trasporto e nello sviluppo di soluzioni di guida connessa e a crescenti livelli di automazione.
Infine, il processo di digital transformation verso le Smart Roads pone particolare attenzione al tema dei costi, perseguendo il principio della sostenibilità dei processi e delle attività e del bilanciamento tra oneri da sostenere e benefici ricavabili. Anche in tale ottica deve essere letta la scelta di promuovere soluzioni legate all’innovazione tecnologica e agli Intelligent Transportation Systems, per i quali è ben noto che i tassi di ritorno degli investimenti sono tra i più elevati. Il principio di proporzionalità tra costi e benefici ottenibili ha anche ispirato la scelta di includere da subito come cogenti per il processo di digital transformation verso le smart road alcune specifiche funzionali relative a servizi più maturi, lasciando ad una implementazione più graduale e preceduta da sperimentazioni l’implementazione di servizi meno maturi, caratterizzati da una minore sperimentazione e presenza sul mercato di soluzioni.
Con riferimento alla comunicazione tra veicoli ed infrastrutture ed ai corrispondenti servizi C-ITS, le specifiche funzionali previste da questo documento sono aderenti agli indirizzi presi in sede europea e internazionale e, nel contribuire a risolvere anche in Europa l’impasse di prima partenza tra sistemi di bordo, già previsti in USA per il 2019, e sistemi road-side, si muove nel rispetto del processo europeo di identificazione dei servizi e di identificazione e promozione di standard tecnologici, al fine di evitare la proliferazione di soluzioni proprietarie che impedirebbe la interoperabilità dei sistemi. Ancora una volta, anche alla luce delle precedenti ultime considerazioni, si vuole sottolineare la neutralità tecnologica di questo documento, tutto orientato verso specifiche funzionali.
2 Il processo di coinvolgimento degli stakeholder
Questo documento è il risultato di un processo che ha visto il coinvolgimento dei maggiori stakeholder del settore che hanno prodotto una ben più vasta documentazione tecnica dalla quale sono stati estratti gli elementi giudicati più maturi e significativi.
Un primo documento è stato presentato ad un nutrito gruppo di stakeholder in occasione di una riunione di condivisione partenariale tenuta presso il Ministero delle Infrastrutture e Trasporti (MIT) nel giugno 2016. Nelle successive settimane sono stati ricevuti commenti ed osservazioni, in base ai quali sono stati organizzati 4 Gruppi di Lavoro su diversi aspetti; i contributi dei Gruppi di Lavoro, nelle versioni finali raccolte tra dicembre 2016 e febbraio 2017 sono stati integrati nella versione finale del position paper, in corso di pubblicazione sul sito del MIT.
Il presente documento rappresenta il primo riferimento per la definizione e caratterizzazione di una Smart Road. Esso sarà soggetto ad aggiornamenti e revisioni, da produrre in considerazione sia degli avanzamenti che interesseranno il settore, soprattutto provenienti dal comparto automotive, sia dell’avanzare del grado di maturità e condivisione (anche a livello internazionale) di piattaforme e servizi. È il caso di notare che, in presenza di una veloce dinamica dell’innovazione delle tecnologie del settore, ed anche in adesione ad un principio di neutralità tecnologica tesa a favorire il mercato senza influenzarlo, il documento presenta esclusivamente specifiche relative a funzionalità, servizi e prestazioni, evitando specifiche tecnologie.
3 Definizione della Smart Road ed ambito di applicazione
Assumono la qualifica di Smart Road le infrastrutture stradali di cui al comma 1 del presente decreto. La trasformazione digitale verso le Smart Road vuole contribuire a creare un ecosistema tecnologico favorevole per l’interoperabilità tra infrastrutture e veicoli di nuova generazione, per l’adeguamento delle infrastrutture alle nuove richieste di mobilità dei parte viaggiatori e per la realizzazione di servizi innovativi per gli utenti della strada e per i gestori stessi, il tutto promuovendo elevati livelli di sicurezza del traffico e delle infrastrutture, anche attraverso una conoscenza continua del loro comportamento.
Una Smart Road è anche un’infrastruttura adeguata ad una dimensione internazionale della mobilità e quindi implementa piattaforme e servizi oggetto di supporto e standardizzazione a livello europeo e internazionale. Le Smart Roads implementano concetti propri:
• Del libro bianco comunitario sui trasporti del 2011 “Tabella di marcia verso uno spazio unico europeo dei Trasporti – per una politica dei trasporti competitiva e sostenibile”;
• della Direttiva 2010/40/UE del 7 luglio 2010 per la diffusione degli ITS;
• della piattaforma europea C-ITS;
• del gruppo di lavoro ad alto livello GEAR 2030;
• del decreto interministeriale n. 39 del 01/02/2013 (cosiddetto decreto ITS);
• del decreto del Ministero delle infrastrutture e dei trasporti n. 44 del 12/02/2014 (adozione del Piano di Azione Nazionale ITS).
• Della comunicazione della Commissione al Parlamento Europe e altri del 30-11-2016 n. 766 “An European strategy on Cooperative Intelligent Transport Systems, a milestone towards cooperative, connected and automated mobility”.
Infine, il concetto di smart road è pensato per adattarsi ad una visione di rete. Per tale motivo, il processo di digital transformation sarà applicato gradualmente, dapprima alle infrastrutture stradali della TEN-T (Trans-European Network – Transport), core e comprehensive, nonché a nuove infrastrutture o tratte infrastrutturali preesistenti di collegamento tra elementi della rete TEN-T, e progressivamente a tutte le infrastrutture identificate dal PGTL (Piano Generale dei Trasporti e della Logistica) del 2001 come appartenenti al livello 1 dello SNIT (Sistema Nazionale Integrato dei Trasporti), e comunque a tutte le tratte autostradali, in conformità agli articoli 4 e 5 del presente decreto.
4 Specifiche funzionali delle Smart Road
In questa sezione si elencano le specifiche funzionali delle Smart Road esse sono riportate in termini generali nel seguente elenco di Tabella 1 e ulteriormente declinate per Smart Road di tipo I e II come descritto dalla tabella 2 riportata più oltre.
Tabella 1 – Elenco generale delle specifiche Smart Road
| ID | Descrizione Specifica Funzionale |
| 1 | Presenza road-side di una rete di comunicazione dei dati ad elevato bit-rate (es.: fibra) |
| 2 | Copertura continuativa dell’asse stradale e delle relative pertinenze con servizi di connessione per la IoT e di routing verso la rete di comunicazione dati |
| 3 | Road-Side Unit per la comunicazione V2I, localizzati in modo tale da consentire la connessione a veicoli dotati di On-boad-unit V2X che soddisfino gli standard di settore |
| 4 | Presenza di un sistema di hot-spot Wifi per la connettività dei device personali, dislocati almeno nelle aree di servizio e di parcheggio (ove presenti) |
| 5 | Dotazione di un sistema di rilievo del traffico ed enforcement, nonché di rilievo delle condizioni di deflusso, articolato su un livello di maggior dettaglio per le smart road di tipo I, in conformità con quanto descritto nella Sezione A (rilievo del traffico e delle condizioni di deflusso); i sistemi di rilievo devono avere le caratteristiche minime di qualità delle misure e rispondere alle regole di qualificazione descritte sempre nella Sezione A; il sistema deve essere progettato in maniera tale da minimizzare la propria impronta ecologica ed energetica |
| 6 | Dotazione di un sistema di archiviazione dei dati provenienti dal rilievo del traffico e delle condizioni di deflusso con funzionalità di archiviazione e storicizzazione, secondo le specifiche della Sezione A (Rilievo del traffico e delle condizioni di deflusso), nel rispetto della normativa in materia di riservatezza e protezione dei dati personali. |
| 7 | Dotazione di un sistema modellistico per la previsione delle condizioni di deflusso a medio-breve termine, nonché per la stima/previsione per periodi di tempo successivi, in accordo con le specifiche di dettaglio della Sezione A (Rilievo del traffico e delle condizioni di deflusso) |
| 8 | Dotazione di un sistema di monitoraggio in tempo reale delle condizioni climatiche e delle piogge, come dettagliato nella Sezione B (Monitoraggio idro/meteo); il sistema deve essere progettato in maniera tale da minimizzare la propria impronta ecologica ed energetica |
| 9 | Capacità, sulla base dei dati di rilievo del traffico e di modelli di previsione di offrire contenuti per servizi avanzati di informazione sul viaggio agli utenti, permettendo eventuali azioni di re-routing; la trasmissione delle informazioni può avvenire utilizzando sistemi di comunicazione V2I, se permesso dagli standard e dalle dotazioni correnti, oppure tramite app web |
| 10 | Controllo in tempo reale da una centrale del traffico dotata di programmi di ausilio alla gestione come indicato nella sezione C (Servizi avanzati ITS), che includano la capacità di applicare scenari di gestione del traffico precostituiti (e soggetti a simulazione degli effetti) selezionati e attuati dinamicamente in funzione dei dati di rilievo del traffico e di altre informazioni ricevute da fonti anche eterogenee; gli scenari possono prevedere mix di possibili misure quali ad esempio: deviazioni dei flussi, in caso di ostruzioni gravi; interventi sulle velocità medie, per evitare o risolvere congestioni (speed control); suggerimento di traiettorie e corsie (lane control); gestione dinamica di accessi (ramp metering) |
| 11 | Capacità di fornire agli utenti della strada, soprattutto ai guidatori professionisti ed alle flotte aziendali, a richiesta, servizi di gestione dei parcheggi e del rifornimento (con particolare riferimento alla ricarica elettrica) |
| 12 | Capacità di fornire, sulla base delle caratteristiche statiche e dinamiche delle infrastrutture, dei dati di rilievo del traffico, delle stime a medio e breve termine delle condizioni di deflusso, del sistema di monitoraggio idro/meteo e di eventuali modelli ed algoritmi specifici, servizi di tipo C-ITS secondo le specifiche di cui alla Sezione C3 (Servizi Avanzati di tipo C-ITS); in prima istanza, i servizi devono potere essere fruiti almeno da veicoli di servizio dell’ente gestore/concessionario della smart-road, nonché dai mezzi pesanti transitanti e dotati a bordo di sistemi di comunicazione V2X |
Le specifiche funzionali del precedente elenco riferiscono alle Smart Road di tipo I e II in accordo con le previsioni dei commi 1 e 2 dell’articolo 6 del presente decreto e, per le infrastrutture non ricadenti nella fattispecie dei citati commi 1 e 2, con la tempistica riportata in tabella 2.
Tabella 2 – Obblighi di applicazione delle specifiche generali Smart Road
| Declinazione dei requisiti per tipologia di Smart Road |
Nuova Costruzione Manutenzione Straordinaria |
Adeguamento delle infrastrutture esistenti | |
| Entro il 2025 | Entro il 2030 | ||
| Smart Road Tipo I | Tutte, da 1 a 12 | 1, 2, 3, 4, 5, 6, 7, 8, 9 | 10, 11, 12 |
| Smart Road Tipo II | 4, 5, 6, 7, 8, 9 | 4, 5, 6 | 7, 8, 9 |
5 Sostenibilità energetica
I sistemi tecnologici, le piattaforme e i servizi di una Smart Road devono essere progettati e messi in esercizio in modo tale da minimizzare l’impronta energetica aggiuntiva generata dalla trasformazione digitale, valutata indipendentemente dai benefici diretti ed indiretti sui consumi e le emissioni dovuti alla ottimizzazione ed efficienza delle condizioni e modalità di deflusso.
È possibile prevedere siti di generazione di energia elettrica necessari per alimentare le tecnologie presenti lungo l’infrastruttura. Eventualmente, una Smart Road può essere, ai fini del bilancio energetico, suddivisa in tratte, ognuna di competenza di un sito, le cui funzioni possono consistere in:
• produzione di energia elettrica mediante fonti rinnovabili;
• accumulo dell’energia prodotta e/o collegamento alla rete di distribuzione nazionale e scambio energetico e/o distribuzione di energia elettrica in itinere lungo la tratta di competenza;
• fornitura di servizi locali a disposizione del gestore e/o commercializzati a terzi,
◊ postazioni di ricarica per veicoli elettrici;
◊ aree di ricarica e atterraggio/decollo droni;
◊ ricarica di strumenti tecnologici mobili a servizio della infrastruttura stradale;
◊ ecc.
La produzione di energia avverrà ricorrendo a fonti rinnovabili. Il mix produttivo deve minimizzare le esigenze di accumulo e di prelievo dalla rete di distribuzione nazionale, contemperando tale esigenza con la necessità di garantire la maggiore convenienza economica possibile.
Sezione A – Rilievo del traffico e delle condizioni di deflusso
A.1. Rilievo del traffico
I dati di flusso, di velocità e le condizioni di deflusso e di rispetto delle regole di circolazione devono essere rilevati dal gestore/concessionario dell’infrastruttura secondo l’articolazione in:
1. Dati di transito ad una sezione (detti anche dati euleriani);
2. Dati sul rispetto dei limiti di velocità e per l’enforcement;
3. Dati di tragitto (detti anche dati lagrangiani).
Nel rilievo dei dati di transito e di quelli di rispetto dei limiti di velocità e per l’enforcement si assume che alcune sezioni significative dell’infrastruttura stradale siano sottoposte all’osservazione continua di un elevato numero di variabili, riferite all’intera corrente di traffico transitante per la sezione considerata. Nel rilievo dei dati di tragitto tra due punti, invece, un campione dei veicoli della corrente di traffico viene sottoposto ad osservazione con riferimento ad un numero ridotto di variabili di deflusso.
In via solo esemplificativa e non esaustiva né prescrittiva e al solo scopo di fissare le idee, il rilievo dei dati di transito e di quelli di velocità per l’enforcement è spesso realizzato attraverso postazioni fisse di misura del traffico e delle sue caratteristiche (es.: spire induttive, sensori above ground, telecamere con riconoscimento automatico del numero di targa, ecc.), mentre il rilievo dei dati di tragitto può essere effettuato con tecniche di Floating Car Data (anche abilitato da tecnologie avanzate di localizzazione satellitare), di vehicle re-identification, o altre.
A.1.1 Rilievo dei transiti ad una sezione
I dati di transito ad una sezione sono quelli osservabili rilevando il passaggio e le caratteristiche di deflusso di singoli veicoli transitanti per una ben definita sezione stradale (sezione di controllo); il sistema di osservazione è solidale alla sezione stradale.
I dati di transito possono essere ottenuti con metodi basate su diversi principi e tecnologie. La tecnologia dei sensori e/o le modalità di rilievo non sono rilevanti se non per l’ottenimento delle specifiche riportate nel seguito. I dati di transito ad una sezione devono essere rilevati dal gestore/concessionario della infrastruttura per l’universo dei veicoli transitanti per la sezione di rilevo/osservazione e non su base campionaria.
I dati identificati in tabella con un asterisco sono considerati dal punto 3 dell’allegato al regolamento delegato europeo 962/2015, quelli caratterizzati con doppio asterisco sono contemplati anche dal decreto interministeriale del febbraio 2013 (cosiddetto Decreto ITS).
Il rilievo dei dati di transito alla sezione deve essere assicurato in continuo 24/24 h e per tutti i giorni dell’anno; particolare attenzione deve essere data alla progettazione energetica dei sistemi, curandone la sostenibilità. Il rilievo deve riferire, ove possibile, a condizioni di deflusso ininterrotto, con conseguente posizionamento della sezione di rilievo in modo da non risentire delle perturbazioni indotte da svincoli, incroci, stazioni di servizi, piazzole di sosta, ecc.
| Specifica | Valorizzazione |
| Localizzazione e caratterizzazione del rilevo | Identificativo, tipologia, tecnologia adottata, localizzazione georeferenziata, sezione stradale associata (es.: nome strada, identificativo sezione, chilometrica, carreggiata, senso di marcia, ecc.). |
| Dati da rilevare | a. Classificazione del veicolo (conteggi classificati, almeno 8 classi + 1)**: 1. Classe 1 (moto) 2. Classe 2 (auto) 3. Classe 3 (auto con rimorchio) 4. Classe 4 (furgone) 5. Classe 5 (camion) 6. Classe 6 (autotreno) 7. Classe 7 (autoarticolato) 8. Classe 8 (autobus) 9. Altro (non classificato) b. Velocità di transito (es.: Km/h) ** c. Istante di rilevamento (es.: gg/mm/aa, hh:mm:ss:mmm) d. Lunghezza veicolo (es.: cm) e. Headway temporale (testa-testa o coda-coda) rispetto a veicolo precedente (es.: millisecondi) f. Presenza di coda in corrispondenza del sensore* |
| Modalità di rilevo | Rilievi separati per singola corsia di marcia, con indicazione della carreggiata e direzione di marcia cui la corsia appartiene. Indicazione esplicita del caso di flusso in controsenso rispetto alla direzione attesa (es.: inversione della direzione di marcia della corsia) |
| Frequenza temporale di osservazione | Continua |
| Livello di disaggregazione della misura/osservazione | Evento singolo (individuazione del passaggio di ogni veicolo) |
| Condizioni di funzionamento | • Intervallo di temperature operativo da -20° a + 55° • Degrado non apprezzabile delle misure in condizioni di: ◊ traffico scarso o traffico elevato ◊ pioggia, anche intensa ◊ notte o scarsa visibilità ◊ nebbia ◊ neve |
| Frequenza di trasmissione/ accentramento del dato in centrale | • Trasmissione per pacchetti di dati • Ogni 5 minuti • Eventuali pacchetti di dati non trasmessi per problemi tecnici devono essere conservati in locale (fino a 48 ore) per la trasmissione non appena possibile |
Per tutte le Smart Road, sia di tipo I sia di tipo II, è necessario individuare almeno due sezioni di rilievo, agli estremi di ogni arco omogeneo.
Un arco omogeneo rappresenta una tratta infrastrutturale che deve essere necessariamente interrotta in corrispondenza di ogni intersezione (a raso o sfalsata) con una altra Smart Road (sia di tipo I sia di tipo II) oppure in corrispondenza di qualsivoglia intersezione (a raso o sfalsata) anche non con altra Smart Road, purché non trascurabile. Una intersezione si dice trascurabile per una Smart Road nel caso in cui il flusso immesso o emunto dalla Smart Road in questione per effetto della intersezione non superi i 100 veicoli/ora nel 90% dei periodi orari di un intero anno. In mancanza di conteggi di traffico in grado di verificare la precedente definizione l’intersezione non può essere considerata di scarsa importanza. L’immissione o uscita da o verso aree di servizio, rifornimento e sosta non è considerata ai fini della identificazione di archi disgiunti. Le sezioni di rilievo devono essere posizionate in modo tale, ove possibile, da rilevare condizioni di deflusso ininterrotto.
A.1.2 Rilievo del rispetto dei limiti di velocità e per l’enforcement
I dati sul rispetto dei limiti di velocità e per l’enforcement devono essere raccolti a cura del gestore/concessionario dell’infrastruttura attraverso dispositivi a bordo strada o above-ground basati su metodologie d’identificazione non ripudiabile del veicolo ed associazione della relativa velocità di transito. I dati di rispetto dei limiti di velocità e per l’enforcement devono essere rilevati obbligatoriamente solo con riferimento alle smart road di tipo I. I dispositivi devono essere basati sull’individuazione delle velocità medie in un tratto significativo di strada e, opzionalmente, anche delle velocità istantanee.
Oltre alla identificazione dei veicoli con finalità di rispetto del codice della strada, devono essere rilevati, per ogni corsia di marcia, i volumi di traffico (rilevati in maniera aggregata con base 15 minuti), la distribuzione delle velocità istantanee (funzione di distribuzione di probabilità, rilevata su base temporale di 15 minuti).
Le sezioni per il rilevo dei limiti di velocità e per l’enforcement devono essere in ragione di almeno 2 per ogni ramo omogeneo definito come alla precedente sezione A1.1 e possono coincidere con le sezioni di rilievo dei transiti. Anche in questo caso le sezioni di rilievo devono osservare, ove possibile, condizioni di deflusso ininterrotto.
Rimangono validi eventuali requisiti aggiuntivi derivanti da prescrizioni imposte dalle autorità preposte all’azione di rispetto delle regole stradali.
A.1.3 Rilievo dei dati di tragitto
I dati di deflusso tra due sezioni (tragitto tra due punti) sono quelli osservabili seguendo il movimento di un veicolo lungo la sua traiettoria da un punto o istante di inizio della osservazione ad un punto od istante di termine della osservazione. I due punti di inizio e fine osservazione rappresentano gli estremi di un segmento. Il sistema di osservazione è solidale al veicolo osservato (da cui anche la dizione alternativa di dati lagrangiani). A scopo esemplificativo e solo per fissare le idee, i dati possono essere ottenuti attraverso tecniche di FCD (Floating Car Data), abilitate da tecnologie avanzate di localizzazione satellitare, da eventuali sensori posti sulla infrastruttura per il rilievo delle caratteristiche del moto e di un sistema di connessione con una centrale di raccolta dei dati. In alternativa, i dati di deflusso tra due punti possono essere ottenuti individuando uno stesso veicolo nei due punti (noti) e calcolando le grandezze di deflusso derivanti dalla distanza trai punti e gli istanti di tempo di rilevamento. In tale ultimo caso il rilievo/individuazione deve avvenire nel rispetto delle esigenze di anonimato e privacy, a meno di quanto espressamente previsto dalle norme per la verifica di regolarità assicurativa/contributiva dei veicoli, per il tracking di veicoli sospetti o rubati, per l’enforcement sulle regole della strada (es. limiti di velocità) e per quanti altri casi esplicitamente previsti dal legislatore.
L’osservazione di dati di deflusso tra due punti può essere effettuata su base campionaria, utilizzando un campione significativo dei veicoli transitanti o verificando ex-post di avere individuato un campione significativo di tali veicoli. Il dato di universo rispetto al quale confrontare la numerosità del campione deve essere quello ottenuto/stimato utilizzando i dati di rilievo dei transiti nelle sezioni più vicine ai due punti di rilievo.
Per le Smart Road di tipo II il rilievo del deflusso tra due punti deve avvenire con riferimento almeno alle sezioni utilizzate per il rilievo dei transiti. Per le Smart Road di tipo I il rilievo del deflusso deve essere effettuato con scansione di 500 metri che rappresenta, dunque, la lunghezza del segmento.
Il dettaglio dei dati di deflusso da rilevare tra due punti è riportato nella successiva tabella; esso riferisce ad ognuno dei due punti estremi del segmento; nella localizzazione e caratterizzazione è indicato se si tratta di estremo iniziale del segmento o estremo finale e quale è l’identificativo dell’altro estremo di segmento.
| Specifica | Valorizzazione |
| Localizzazione e caratterizzazione del rilevo | Identificativo univoco, tipologia, tecnologia adottata, localizzazione georeferenziata, sezione stradale associata (es.: nome strada, chilometrica, carreggiata, senso di marcia, ecc.), indicazione se estremo iniziale o finale del segmento, identificativo univoco dell’altro estremo del segmento. |
| Dati da rilevare | a) Istante di rilevamento (es.: gg/mm/aa, hh:mm:ss:mmm) b) Codice di individuazione univoco (anonimo) associato al rilievo |
| Frequenza temporale di osservazione | Continua |
| Livello di disaggregazione della misura/osservazione | Evento singolo (individuazione del passaggio di ogni veicolo individuabile nell’estremo finale del segmento e già individuato nell’estremo iniziale) |
| Condizioni di funzionamento | • Intervallo di temperature operativo da -20° a + 55° • Degrado non apprezzabile delle misure in condizioni di: ◊ traffico scarso o traffico elevato ◊ pioggia, anche intensa ◊ notte o scarsa visibilità ◊ nebbia ◊ neve |
| Frequenza di trasmissione/ accentramento del dato in centrale | • Trasmissione per pacchetti di dati • Ogni 5 minuti • Eventuali pacchetti di dati non trasmessi per problemi tecnici devono essere conservati in locale (fino a 48 ore) per la trasmissione non appena possibile |
A.2 Registrazione dei dati in centrale, archiviazione e storicizzazione
I dati rilevati sul campo e relativi alla precedente sezione A.1 devono essere sistematizzati e registrati in appositi database a cura del gestore/concessionario dell’infrastruttura. La ricerca e l’accesso ai dati deve essere possibile da parte del gestore/concessionario, da parte del Ministero delle Infrastrutture e dei Trasporti, da parte del Ministero dell’Interno per le finalità relative alla sicurezza stradale e da parte di utenti terzi accreditati dal gestore/concessionario o autorizzati dal Ministero delle Infrastrutture e Trasporti, nel rispetto della normativa in materia di riservatezza e protezione dei dati personali. Con riferimento alla parte di dati storicizzati, come definiti nel seguito, si applica inoltre un approccio open-data.
I database sono articolati secondo tre repository principali. Uno è dedicato ai dati disaggregati.
Esso riferisce ai dati così come rilevati e trasmessi dai dispositivi periferici (sezione A.1) e preserva quindi la massima disaggregazione del dato. I dati vengono inseriti nel database disaggregato dopo essere stati estratti dai pacchetti utilizzati per la trasmissione. I dati del repository disaggregato sono conservati con riferimento all’ultimo mese di rilevazione. Un ulteriore repository riferisce ai cosiddetti dati correnti; si tratta di una elaborazione dei dati dettagliati, finalizzata ad una prima aggregazione ma tale per cui il valore informativo dei dati si mantenga di elevato livello di dettaglio. È ragionevole supporre che la maggior parte dei servizi informativi in tempo reale possa essere basato sulle informazioni contenute nei dati correnti. I dati correnti vengono conservati con riferimento agli ultimi dodici mesi e vengono archiviati in maniera da essere recuperati su base giornaliera. Le regole di aggregazione per ottenere i dati correnti sono descritte nelle tabelle seguenti. Il terzo repository è quello dei dati storicizzati; esso riferisce ad un ulteriore processo di elaborazione teso a ricavare valori statistici descrittivi del fenomeno del traffico. È ragionevole pensare che i dati storicizzati siano utilizzati soprattutto in modalità off-line e per applicazioni di pianificazione e programmazione. I dati storicizzati vengono conservati con riferimento agli ultimi 10 anni. Le regole per la storicizzazione dei dati sono anche esse riportate in successive tabelle. Lo sviluppo, implementazione, verifica, manutenzione ed aggiornamento delle strutture dei repository devono essere fatte obbligatoriamente con il coinvolgimento di un tecnico specificamente qualificato nel campo della ingegneria dei sistemi di trasporto.
A.2.1 Aggregazione in dati correnti dei rilievi di transito ad una sezione.
| Misura | Modalità di aggregazione | Intervallo di aggregazione |
| Conteggio veicoli | Somma sull’intervallo di aggregazione ◊ Per ogni categoria di veicoli ◊ Per ogni corsia |
Ogni 5 minuti, a partire dalle ore 00:00 |
| Somma sull’intervallo di aggregazione ◊ Per ogni categoria di veicoli |
||
| Somma sull’intervallo di aggregazione, utilizzando appositi coefficienti di equivalenza per l’espressione in termini di autoveicoli equivalenti | ||
| Velocità di transito | Media armonica sull’intervallo di aggregazione ◊ Per ogni categoria di veicoli ◊ Per ogni corsia |
|
| Media armonica sull’intervallo di aggregazione ◊ Per ogni corsia |
||
| Media armonica sull’intervallo di aggregazione | ||
| Somma sull’intervallo di aggregazione del numero di velocità istantanee rilevate all’interno di prefissate classi di velocità (propedeutica alla funzione di distribuzione di velocità) ◊ Per ogni categoria di veicoli ◊ Per ogni corsia |
||
| Somma sull’intervallo di aggregazione del numero di velocità istantanee rilevate all’interno di prefissate classi di velocità ◊ Per ogni corsia |
||
| Somma sull’intervallo di aggregazione del numero di velocità istantanee rilevate all’interno di prefissate classi di velocità | ||
| Lunghezza veicolo | Media sull’intervallo di aggregazione ◊ Per ogni corsia |
|
| Media sull’intervallo di aggregazione | ||
| Headway tra veicoli successivi | Media e varianza sull’intervallo di aggregazione ◊ Per ogni corsia |
|
| Media e varianza sull’intervallo di aggregazione | ||
| Time-to-collision tra veicoli successivi | Media e varianza sull’intervallo di aggregazione della quantità –ΔX/ΔV, con ΔX = VFH – LF e ΔV = VL-VF, da valorizzare solo per ΔVF = velocità del secondo veicolo, H = headway temporale del secondo veicolo rispetto al primo, LF = lunghezza del secondo veicolo, VL = velocità del primo veicolo. ◊ Per ogni corsia |
|
| Media e varianza sull’intervallo di aggregazione della quantità –ΔX/ΔV, da valorizzare solo per ΔV<0 |
A.2.2 Aggregazione in dati correnti di rilievi del rispetto dei limiti di velocità (enforcement)
| Misura | Modalità di aggregazione | Intervallo di aggregazione |
| Numero di violazioni rilevate | Somma sull’intervallo di aggregazione ◊ Per ogni categoria di veicoli ◊ Per ogni corsia |
Ogni 5 minuti, a partire dalle ore 00:00 |
| Somma sull’intervallo di aggregazione ◊ Per ogni categoria di veicoli |
||
| Somma sull’intervallo di aggregazione | ||
| Entità delle violazioni | Somma sull’intervallo di aggregazione del numero di osservazioni superiori ai limiti di velocità ricadenti all’interno di prefissate classi di velocità ◊ Per ogni categoria di veicoli ◊ Per ogni corsia |
|
| Somma sull’intervallo di aggregazione del numero di osservazioni superiori ai limiti di velocità ricadenti all’interno di prefissate classi di velocità ◊ Per ogni corsia |
||
| Somma sull’intervallo di aggregazione del numero di osservazioni superiori ai limiti di velocità ricadenti all’interno di prefissate classi di velocità |
A.2.3 Elaborazione e Aggregazione in dati correnti di rilievi di dati di tragitto
| Misura | Modalità di elaborazione/aggregazione | Intervallo di elaborazione/aggregazione |
| A partire, per ogni veicolo (re)identificato in due punti successivi di un segmento, dal tempo di percorrenza: calcolo della velocità come rapporto tra la differenza temporale degli istanti di identificazione e la lunghezza del segmento | Velocità forward, associata al punto iniziale del segmento ed all’istante di inizio aggregazione. Somma delle occorrenze rilevate in predeterminate classi di velocità * ◊ Per ogni segmento |
Ogni 5 minuti, a partire dalle ore 00:00. |
| Velocità backward, associata al punto finale del segmento ed all’istante di fine aggregazione. Somma delle occorrenze rilevate in predeterminate classi di velocità * ◊ Per ogni segmento |
I dati identificati in tabella con un asterisco (*) sono considerati dal punto 3 dell’allegato al regolamento delegato europeo 962/2015, quelli caratterizzati con doppio asterisco sono contemplati anche dal decreto interministeriale del febbraio 2013 (cosiddetto decreto ITS).
A.2.4 Storicizzazione di rilievi di transito ad una sezione
| Misura | Modalità di aggregazione | Intervallo aggregazione |
| A partire dai conteggi classificati del dato a livello corrente | Flusso orario ◊ Per categoria di veicoli ◊ Per corsia |
Per ogni ora del giorno, per ogni giorno degli ultimi 120 mesi |
| A partire dalle velocità di transito del dato a livello corrente | Velocità media nell’ora (occorre utilizzare la media armonica) ◊ Per categoria di veicoli ◊ Per corsia |
|
| A partire dagli headway del dato a livello corrente | Headway medi nell’ora ◊ Per corsia |
|
| A partire dalle lunghezze medie dei veicoli del dato a livello corrente) | Lunghezza media oraria dei veicoli transitanti ◊ Per corsia |
|
| A partire dal time-tocollision medio deln dato a livello corrente | Time-to-collision medio orario ◊ Per corsia |
|
| A partire dai flussi orari per categoria e corsia | Valore minimo, medio, massimo e deviazione standard del flusso orario ◊ Per categoria di veicoli ◊ Per corsia |
Per ogni giorno degli ultimi 120 mesi |
| A partire dalle velocità di transito per singolo passaggio (dato disaggregato) | Numerosità delle velocità istantanee rilevate all’interno di prefissate classi di velocità (propedeutica alla funzione di distribuzione di velocità), calcolato con riferimento alla fascia di maggior flusso orario. • Per ogni corsia |
|
| A partire dalle velocità di transito per singolo passaggio (dato disaggregato) | Numerosità delle velocità istantanee rilevate all’interno di prefissate classi di velocità (propedeutica alla funzione di distribuzione di velocità), calcolato con riferimento alla aggregazione di tutte le fasce orarie con flusso non superiore ad 1/10 del flusso giornaliero massimo. • Per ogni corsia |
|
| A partire dagli headway rilevati per singolo passaggio (dato disaggregato) | Numerosità degli headway all’interno di prefissate classi di headway (propedeutica alla funzione di distribuzione), calcolato con riferimento alla fascia di maggior flusso orario. • Per ogni corsia |
|
| A partire dagli headway rilevati per singolo passaggio (dato disaggregato) | Numerosità degli headway all’interno di prefissate classi di headway (propedeutica alla funzione di distribuzione), calcolato con riferimento alla aggregazione di tutte le fasce orarie con flusso non superiore ad 1/10 del flusso giornaliero massimo. • Per ogni corsia |
A.2.5 Storicizzazione di rilievi del rispetto dei limiti di velocità (enforcement)
| Misura | Modalità di aggregazione | Intervallo di aggregazione |
| Numero di violazioni rilevate | Somma sull’intervallo di aggregazione ◊ Per ogni corsia |
Per ogni ora del giorno, per ogni giorno degli ultimi 120 mesi |
| Entità delle violazioni | Somma sull’intervallo di aggregazione del numero di osservazioni superiori ai limiti di velocità ricadenti all’interno di prefissate classi di velocità ◊ Per ogni corsia |
|
| Numero di violazioni rilevate | Somma sull’intervallo di aggregazione, calcolato con riferimento alla fascia di maggior flusso orario (identificata cumulando il flusso su tutte le corsie ed espresso in autoveicoli equivalenti) ◊ Per ogni corsia |
Per ogni giorno degli ultimi 120 mesi |
| Somma sull’intervallo di aggregazione, calcolato con riferimento alla aggregazione di tutte le fasce orarie con flusso non superiore ad 1/10 del flusso giornaliero massimo ◊ Per ogni corsia |
||
| Entità delle violazioni | Somma sull’intervallo di aggregazione del numero di osservazioni superiori ai limiti di velocità ricadenti all’interno di prefissate classi di velocità, calcolato con riferimento alla fascia di maggior flusso orario (identificata cumulando il flusso su tutte le corsie di uno stesso verso di marcia ed espresso in autoveicoli equivalenti) ◊ Per ogni corsia |
|
| Somma sull’intervallo di aggregazione del numero di osservazioni superiori ai limiti di velocità ricadenti all’interno di prefissate classi di velocità, calcolato con riferimento alla aggregazione di tutte le fasce orarie con flusso non superiore ad 1/10 del flusso giornaliero massimo ◊ Per ogni corsia |
A.2.6 Storicizzazione di rilievi di dati di tragitto
| Misura | Modalità di aggregazione | Intervallo di aggregazione |
| Velocità forward media di percorrenza sul segmento (A partire dal punto iniziale) | Somma delle occorrenze rilevate in predeterminate classi di velocità | Per ogni ora del giorno e per ogni giorno degli ultimi 120 mesi |
| Somma delle occorrenze rilevate in predeterminate classi di velocità, calcolato con riferimento alla fascia di maggior flusso orario | ||
| Somma delle occorrenze rilevate in predeterminate classi di velocità, calcolato con riferimento alla aggregazione di tutte le fasce orarie con flusso non superiore ad 1/10 del flusso giornaliero massimo | ||
| Velocità backward media di percorrenza sul segmento (a partire dal punto finale) | Somma delle occorrenze rilevate in predeterminate classi di velocità | |
| Somma delle occorrenze rilevate in predeterminate classi di velocità, calcolato con riferimento alla fascia di maggior flusso orario | ||
| Somma delle occorrenze rilevate in predeterminate classi di velocità, calcolato con riferimento alla aggregazione di tutte le fasce orarie con flusso non superiore ad 1/10 del flusso giornaliero massimo |
A.3 Modelli di previsione a breve termine
A partire dai dati rilevati sul campo (sezione A.1), il soggetto gestore/concessionario della infrastruttura è tenuto, attraverso l’utilizzo di strumenti analitici e modelli opportuni, a fornire una previsione di traffico e condizioni di deflusso a medio-breve termine. In particolare, la seguente tabella riporta le informazioni da prevedere. Le previsioni devono essere aggiornate ogni 15 minuti e proiettate in avanti con una tecnica di rolling-horizon, con orizzonti temporali di 15, 30 e 45 minuti.
Quantità da stimare/prevedere
| Misura | Riferimento spaziale della stima | Orizzonte di stima | Frequenza aggiornamento stima |
| Flusso complessivo (autoveicoli equivalenti) per verso di marcia e per ogni ramo omogeneo | Sezione di rilievo del traffico | a 15, 30 e 45 minuti | Ogni 15 minuti |
| Tempi di percorrenza tra gli estremi di uno stesso ramo omogeneo | Forward travel-time | ||
| Backward travel-time |
I metodi per ottenere le stime/previsioni devono essere sviluppati, implementati, certificati e ciclicamente sottoposti a processi di manutenzione, aggiornamento e revisione, con cadenze non più che biennali, a cura di tecnici con elevata e specifica qualificazione nel settore della ingegneria dei sistemi di trasporto.
A.4 Modelli di previsione su periodi di tempo omogenei successivi
A partire dai dati rilevati sul campo (sezione A.1) e da quanto storicizzato e archiviato (sezione A.2), devono essere prodotte stime di traffico e di tempi di percorrenza valide per successioni di periodi omogenei. Ad esempio, devono essere disponibili, ad un certo giorno, previsioni di traffico e tempi di percorrenza per tutti i giorni feriali successivi di una settimana e per i giorni festivi della settimana stessa; tali stime devono essere almeno espresse in termini di traffico giornaliero medio e fattore dell’ora di punta, raffrontati al traffico giornaliero medio ed al fattore di ora di punta medi dello stesso periodo di riferimento (es.: giorno feriale medio o giorno di fine settimana). Ove possibile, utilizzando una tecnica di selezione e raffronto di pattern osservati e proiezione, o altre tecniche di stima esperta, o infine, almeno, tecniche di estrapolazione per analogia, deve essere operata una previsione del traffico e dei tempi di percorrenza in caso di implementazione di lavori di manutenzione, modifiche alle regole di circolazione, ecc.
I metodi per ottenere le previsioni devono essere sviluppati, implementati, certificati e ciclicamente sottoposti a processi di manutenzione, aggiornamento e revisione, con cadenze non più che biennali, a cura di tecnici con specifica qualificazione nel settore della ingegneria dei sistemi di trasporto.
A.5 Qualità delle misure
I dati rilevati dagli enti gestori/concessionari devono essere sottoposti a verifiche di qualità. Le verifiche devono essere eseguite rispetto agli strumenti ed alle tecnologie utilizzate per la misura/osservazione dei dati, con riferimento sia a quelli di transito alle sezioni che di tragitto tra punti successivi e validando i risultati delle misure in termini di accostamenti alla realtà. L’accuratezza dei dati di transito deve assicurare che i conteggi classificati siano corretti, in termini di accuratezza della classificazione, in almeno il 90% dei casi. Le velocità locali di passaggio misurate alle postazioni di rilievo deve differire da quelle reali al più del 10% in almeno il 90% dei casi. Analogamente, l’errore nell’headway misurato deve essere al più del 10% in almeno il 90% dei casi. Per le misure di tragitto tra due punti successivi, almeno il 10% del flusso transitante nelle sezioni soggette a rilievo deve essere campionato. I tempi di percorrenza campionati devono presentare un errore massimo del 20% rispetto a quelli reali in almeno lo 85% dei casi. Sia per le misure di velocità di transito che per quelle di tragitto la funzione di densità di probabilità misurata dalle attrezzature poste sul campo deve risultare simile a quella ottenuta con le misure di controllo e validazione.
Le misure di transito ad una sezione devono essere sottoposte a verifica in un duplice modo:
a) utilizzando gli stessi strumenti adottati per le misure di campo ma in un ambiente controllato e con caratteristiche analoghe a quelle reali;
b) in maniera duale alla precedente, utilizzando sul campo soggetto a misure strumenti diversi da quelli posizionati/utilizzati dall’ente gestore/concessionario e procedendo a verificare l’ottenimento di misure simili.
Le misure di tragitto tra due sezioni devono essere anche esse sottoposte a verifica con logiche simili, sia eseguendo validazioni in ambiente controllato degli strumenti utilizzati in campo reale, sia effettuando le misure contemporaneamente a quelle reali ma con strumenti diversi, eventualmente con l’utilizzo di idonei veicoli strumentati. Per la parte di verifiche effettuate in campo controllato, occorre procedere in condizioni di traffico realistiche e non idealizzate; le condizioni di installazione devono essere rappresentative di quelle che saranno realizzate su campo e le operazioni di messa in opera devono essere eseguite a regola d’arte a cura dell’operatore economico/fornitore (o dell’ente gestore/concessionario realizzatore).
Le verifiche di qualità e accuratezza delle misure devono essere effettuate:
1. A cura dell’ente gestore/concessionario, in fase di realizzazione/fornitura delle soluzioni di digital transformation. Occorre obbligatoriamente verificare la conformità alle specifiche funzionali qui definite. Ove la soluzione sia realizzata direttamente dal gestore/concessionario della strada ad esso spetto l’onere obbligatorio di provare la conformità alle specifiche. Ove la soluzione sia fornita all’ente gestore/concessionario da un operatore terzo, l’ente assume il ruolo di amministrazione aggiudicatrice e l’obbligo si manifesta attraverso la obbligatorietà per l’ente gestore/concessionario di esigere le prove di conformità. Ai fini della prova di conformità, in mancanza di un organismo accreditato ai sensi del regolamento (UE) n. 765/2008, occorre rivolgersi ad un organismo terzo di chiara alta qualificazione. Le prove di conformità devono avvenire in almeno tre fasi di realizzazione/fornitura della soluzione:
a. Prima della messa in opera, testando soluzioni e piattaforme in un sito controllato, a cura dell’organismo terzo di alta qualificazione;
b. In fase iniziale, con riferimento ad una installazione completa da un punto di vista funzionale ma in scala ridotta, realizzata/fornita a scopo prototipale ed installata in campo su un sito campione scelto nell’ambito della infrastruttura da sottoporre a digital transformation.
c. In seguito alla realizzazione/fornitura completa della soluzione, operando sul campo e verificando almeno il 10% del sistema realizzato.
2. A cura del gestore/concessionario, successivamente al termine di realizzazione/fornitura della soluzione, con campagne di verifica cadenzate ogni 6 mesi, su almeno il 5% del sistema realizzato ad ogni campagna di verifica e con l’obbligo di non ri-sottoporre a verifica la stessa parte di sistema prima di avere realizzato la verifica di tutte le altre parti.
Il Ministero delle Infrastrutture e Trasporti può sottoporre a verifica non più del 10% del sistema, scelto a campionamento e per non più di due campagne di verifica ogni 6 anni su uno stesso sistema. Allo scopo di implementare in maniera efficace le azioni di qualificazione di cui ai precedenti punti, le postazioni che implementano l’osservazione e misura di dati di transito alla sezione devono essere dotate di telecamere di contesto atte ad osservare il traffico misurato. La validazione delle misure deve riportare la funzione di distribuzione dell’errore rispetto al dato di confronto.
I sistemi di stima e previsione (sezioni A3 e A4) devono essere anche essi validati. Trattandosi di previsione di dati che saranno misurati dal sistema, la loro validazione può essere eseguita attraverso un raffronto ex-post. La validazione delle stime deve essere eseguita, su base campionaria e con cicli di verifica ripetuti nel tempo.
Sezione B – Monitoraggio idro/meteo
I sistemi informativi meteorologici stradali (o “road weather information systems”, RWIS) sono finalizzati a stimare in tempo reale variabili potenzialmente in grado di elevare il livello di rischio della circolazione stradale, elaborando dati che sono messi a disposizione del Dipartimento della protezione civile. Le variabili da monitorare in un RWIS comprendono:
1. Intensità di precipitazione
2. Temperatura dell’aria
3. Velocità e direzione del vento
4. Umidità dell’aria
5. Livello idrico dei corsi d’acqua in corrispondenza degli attraversamenti
6. Visibilità in presenza di nebbia, foschia o polveri
7. Stato del manto stradale (asciutto/bagnato/innevato/ghiacciato)
La misura delle prime cinque variabili è da ritenersi elemento essenziale di un RWIS, mentre la misura delle restanti due è di grande importanza ma può essere surrogata da quella di altre variabili (ad esempio, umidità dell’aria e temperatura del manto stradale), anche se con accuratezza di misura inferiore. Ulteriori misure di interesse in casi specifici includono la distribuzione dei diametri delle idrometeore (drop size distribution), misurabile tramite disdrometri e la concentrazione di specifici inquinanti atmosferici (ad esempio CO, CO2, NO2 e PM-10), in particolare in corrispondenza di gallerie ed attraversamenti urbani.
Alcune specifiche funzionali dei sistemi di monitoraggio sono riportate nella seguente tabella
| Variabile | Densità spaziale di misura (minima) | Risoluzione temporale (minima) |
| Intensità e tipologia di precipitazione | 1 sensore ogni 3 km | 5 minuti |
| Temperatura dell’aria | 1 sensore ogni 10 km | 10 minuti |
| Velocità e direzione del vento | Sui viadotti e 1 sensore ogni 20 Km altrove | 1 minuto |
| Umidità dell’aria | 1 sensore ogni 3 km | 10 minuti |
| Livello idrico dei corsi d’acqua | In corrispondenza di attraversamenti e tratti esondabili | 10 minuti |
| Visibilità | 1 sensore ogni 3 km | 1 minuto |
| Stato del manto stradale | 1 sensore ogni 3 km | 5 minuti |
Tutte le misure, da acquisirsi a cura del gestore/concessionario dell’infrastruttura, dovranno essere rispondenti alle specifiche da sensoristica diffusa e sempre connessa/attivabile secondo il paradigma dell’IoT. La connettività wireless con tecnologie “low-bandwith” sarà da preferirsi in un’ottica di ottimizzazione del traffico dati, anche al fine di garantire una maggiore tempestività della trasmissione dell’informazione. A tal fine devono essere favorite le soluzioni che garantiscono una dislocazione periferica della capacità di analisi del dato.
Le caratteristiche salienti che deve possedere un RWIS per essere adeguato ad una smart road sono ulteriormente dettagliare nel seguito, per quanto attiene agli elementi da rilevare ed alle modalità del rilievo.
B.1 Densità dei dati
Condizioni meteorologiche avverse possono presentarsi con elevatissima disomogeneità spaziale, a causa della variabilità spaziale dei fenomeni meteorologici intensi, particolarmente marcata su larga parte del territorio nazionale. In particolare, il dato pluviometrico, l’umidità dell’aria, la visibilità e lo stato del manto stradale sono quelli con maggiore variabilità spaziale e che quindi necessitano di una maggiore densità di punti di misura (tipicamente, una ogni 1-5 Km). Le raffiche di vento hanno anch’esse una elevata variabilità spaziale, ma i siti a maggiore rischio sono riconoscibili più facilmente (ad esempio, viadotti, aree di fondovalle, etc.), rendendo quindi più facile la selezione mirata dei siti di installazione. Considerazioni analoghe valgono per i sensori di livello idrico, da installare solo in corrispondenza degli attraversamenti fluviali. La temperatura, infine, ha una variabilità spaziale meno forte, quando si ripulisce il segnale dagli effetti della quota e dell’esposizione; d’altra parte però la misura della temperatura dell’aria è relativamente a basso costo, al punto che è in molti casi ragionevole garantire una densità della rete termometrica analoga a quella delle altre reti di misura. Gli elevati requisiti di densità possono essere rispettati considerando una virtuosa integrazione con dati da altre reti di misura, con l’utilizzo di sensori a basso costo o multifunzione, e con l’integrazione di misure da crowdsourcing.
B.2 Qualità ed integrità dei dati
Tutti i dati devono essere trasmessi, a cura del gestore/concessionario dell’infrastruttura, in tempo reale ad un sistema di gestione. Deve essere garantita l’interoperabilità, che permetta di potere integrare i dati in differenti piattaforme di gestione. L’integrità del dato deve sempre essere verificabile anche in termini di attendibilità, aggiornamento, precisione, accuratezza e completezza, mediante metadati. Data la necessità di integrare i dati provenienti da fonti diverse, risulta di particolare rilevanza associare ad ogni dato (sensore) una misura dell’incertezza, in modo da poter successivamente pesare le informazioni reperite considerando che alcuni dati sono più accurati e precisi di altri.
B.3 Integrabilità con dati da reti esistenti
I dati acquisiti tramite la rete di misura del RWIS devono essere integrabili con quelli disponibili da altre reti idro-meteo operative sul territorio di interesse. Di particolare rilevanza è l’integrazione con i dati da rete pluviometrica e termometrica gestita dalle Agenzie Regionali Per l’Ambiente (ARPA) e con i dati da radar meteorologico, dove disponibili, provenienti dalla rete ARPA o dalla Protezione Civile.
B.4 Utilizzo di dati da sensori a basso costo o multifunzione
Sempre in un’ottica di incremento della densità spaziale delle misure, è fondamentale che il RWIS valorizzi i dati resi disponibili da sensori idrometeorologici a basso costo recentemente sviluppati per molte delle variabili di interesse. Analogamente, occorre valorizzare i sistemi di misura che con un solo apparato consentono di monitorare diverse variabili (ad esempio, sistemi video che consentano di ottenere stime di visibilità, stato del manto stradale ed intensità di precipitazione, oltre che di monitorare lo stato del traffico), riducendo sensibilmente i costi di installazione.
B.5 Integrabilità con dati crowdsourced
È infine fondamentale sfruttare la sempre maggiore disponibilità di sensori meteorologici sui veicoli o direttamente negli apparati utilizzati dai cittadini (ad esempio smartphones e tablet). Occorre quindi prevedere la possibilità di integrare dati forniti da cittadini in viaggio sulle Smart Roads (o direttamente proveniente dai veicoli in modalità V2I), previa messa a punto di sistemi automatici di valutazione dell’attendibilità e dell’accuratezza del dato fornito.
B.6 Conservazione ed elaborazione dei dati
Per quanto attiene invece al complesso funzionale dei dati in una logica di modelli previsionali e di allerta, i risultati del monitoraggio andranno opportunamente archiviati ed analizzati, anche in tempo reale. Occorrerà mettere a punto un sistema specifico in grado di garantire in automatico l’individuazione di situazioni di potenziale rischio idrometeorologico, considerando, dove necessario, i risultati di opportuna modellistica idrologica (modelli afflussi-deflussi per individuare le infrastrutture a rischio inondazione) o geotecnici (individuazione delle situazioni a rischio di frana). Le situazioni di rischio andranno localizzate a cura del gestore/concessionario della infrastruttura e quantificate in tempo reale, e trasmesse in maniera automatica e mediante sistemi di comunicazione multicanale alle autorità preposte (gestore/concessionario della rete stradale, VVF, Protezione Civile, Pronto Intervento, etc.) per consentire un rapido intervento dove necessario.
Sezione C – Servizi avanzati di tipo ITS
C.1 Introduzione
I servizi avanzati di tipo ITS (Intelligent Transportation Systems) si possono suddividere in due categorie:
a) I sistemi e servizi di tipo più tradizionale, che sfruttano tecnologie mature da alcuni anni (sistemi e servizi di informazione e gestione)
b) I servizi di tipo “cooperativo”, che sfruttano l’interazione diretta tra veicolo e infrastruttura (servizi abilitati delle tecnologie di tipo V2X), che vanno oggi sotto il nome di C-ITS (cooperative ITS).
C.2 Sistemi di informazione e gestione
Le Smart Road di tipo I dovranno essere dotate di opportuni Centri di Gestione e Controllo che realizzino alcune funzioni di base, avendo come obiettivo tanto la sicurezza e l’efficienza della viabilità quanto la gestione ottimale dell’infrastruttura. Si descrivono di seguito le funzioni di base che caratterizzano la smart road.
Analisi prestazionale
L’Analisi prestazionale prevede lo studio continuo delle prestazioni dei vari tratti stradali.
Diventa necessario prevedere funzioni che alimentino una base dati storica delle prestazioni, inclusi i dati relativi alla sicurezza stradale. Tra le funzioni per l’analisi delle prestazioni dei tratti significativi della rete stradale si annoverano:
› analisi delle prestazioni correnti mediante confronto tra i dati correnti e i dati target (efficienza del traffico);
› analisi dei dati di sicurezza per il confronto tra gli archi della rete;
› analisi dei dati sulle infrastrutture (e.g. frequenza e severità dei cantieri) con il confronto tra tratti omologhi;
› mantenimento di un archivio di “punti neri” per sicurezza, efficacia e resilienza delle infrastrutture.
Gestione scenari e Previsione
Le funzioni in questa area sono di supporto alla Gestione del Traffico e alla pianificazione; usano la massa di dati presenti in archivio (ed eventualmente altri dati ottenibili da terzi) per effettuare previsioni sul traffico, individuare possibili strategie di gestione, simularne le conseguenze e definire scenari di intervento coordinati e resi pubblici. Uno “scenario di intervento concordato” è caratterizzato da:
› rete interessata
› elenco di eventi che motivano lo scenario
• tipo
• localizzazione
• severità
› elenco di azioni contenute nello scenario (e.g. chiusure, diversioni, speed control, informazioni)
• tipo
• localizzazione
• livello
Le previsioni dovranno rispettare le specifiche di cui ai paragrafi A.3 e A.4
Le funzioni possibili sono:
- generazioni previsioni a breve (A.3) e per periodi omogenei (A.4)
- preparazione, verifica e archiviazioni scenari
Gestione operativa del traffico
In questa area ricadono le funzioni che conducono alla formulazione di decisioni per la gestione del traffico . A tal fine, possono essere utilizzate le funzioni di analisi e simulazione già elencate nell’area “previsione” e, se del caso, attuare gli “scenari” decisi. Le azioni possibili includono:
› deviazioni dei flussi, in caso di ostruzioni gravi;
› interventi sulle velocità medie, per evitare o risolvere congestioni (speed control);
› suggerimento di traiettorie e corsie (lane control);
› gestione dinamica di accessi (ramp metering);
› gestione semaforica.
Le funzioni possibili sono:
› analisi degli allarmi ricevuti su eventi vari;
› verifica dell’archivio “scenari” e, ove esistenti e corrispondenti, decisione sulla loro applicazione;
› attuazione di metodi di controllo automatici (velocità, corsia, rampe).
Gestione parcheggi (inclusi i servizi per i veicoli pesanti e i veicoli elettrici)
In questa area ricadono le funzioni che abilitano il supporto digitale alla sosta e al parcheggio. Sono di particolare importanza due casi, che richiedono informazione accurata e previsione: la sosta dei veicoli trasporto merci e la sosta (con il carico batteria) dei veicoli elettrici. Sono poi incluse anche le informazioni relative alle aree di sosta generali (disponibilità di servizi, di carburanti speciali, prezzi e simili). Le funzioni possibili sono:
› Gestione delle informazioni (semi statiche) sulle aree di sosta;
› Monitoraggio della situazione e previsione a breve termine della disponibilità (usando anche i dati correnti e storici di traffico e di domanda);
› Gestione delle prenotazioni.
Gestione cantieri
I cantieri stradali devono essere seguiti centralmente, con previsione dei tempi e dei luoghi su cui il cantiere ha impatto, anche con tecniche di monitoraggio “on-line” della posizione, eventualmente basate sulla localizzazione satellitare Possono essere utilizzati sistemi self-aware di cantieri in grado di comunicare la propria posizione in centrale operativa (allo scopo di verificare il programma di intervento e assicurare la pubblicizzazione delle relative informazioni) e direttamente ai veicoli (attrezzati) sopraggiungenti, con tecnologie di tipo V2I.
Sorveglianza, sanzionamento e sicurezza
Le funzioni in questa aree, con il coinvolgimento degli organi di polizia stradale, sorvegliano la rete stradale, sanzionano i comportamenti illegali e tracciano, per ragioni di sicurezza, i movimenti di veicoli speciali o di veicoli segnalati, nel rispetto della normativa in materia di riservatezza e protezione dei dati personali. Molte delle funzioni di questa area sono abilitate dai servizi di raccolta, elaborazione e distribuzione dei dati sulla circolazione e sul traffico ed in particolare dai sistemi e dispositivi di campo descritti nella sezione A. Alcune funzioni possibili sono:
› gestione delle telecamere di sorveglianza;
› gestione dei sistemi (rilievo, enforcemenet o “cooperativi”) per il rilievo automatico delle targhe e delle infrazioni;
› sanzionamento delle infrazioni;
› gestione dei vari allarmi ricevuti dai sistemi di rilievo ed enforcement (e.g. veicolo in senso di marcia errato) e dalle comunicazioni V2I.
› verifica di conformità per assicurazione
Gestione e tracciamento di veicoli speciali.
Transiti eccezionali: devono essere previste funzioni in grado di abilitare la prenotazione, l’instradamento, il tracciamento e il monitoraggio per i transiti eccezionali.
Merci pericolose: devono essere registrati gli incidenti segnalati (attraverso la comunicazione V2I) dai veicoli che trasportano merci pericolose.
Veicoli di emergenza, di sicurezza, di cantiere: devono essere tracciati (attraverso la comunicazione V2I), con la esclusione dei veicoli in servizio di polizia.
C.2.1 Supporto per i gestori di infrastrutture
I gestori di Smart Road, nella definizione e nella realizzazione dei sistemi di informazione e gestione, sono supportati dall’Osservatorio tecnico di cui all’articolo 20 del presente decreto, in particolare attraverso la definizione di un quadro di insieme nazionale, anche in conformità con le “best practices” internazionali. L’Osservatorio, nell’ambito dei sui compiti, in collaborazione con i gestori, realizzerà e documenterà specifiche architetturali condivise.
C.3 Servizi avanzati di tipo C-ITS
La Commissione Europea, nel documento strategico del 30 novembre 2016, ha indicato l’obiettivo di realizzare i servizi C-ITS cosiddetti “day 1” (per i quali si ritiene che le specifiche siano sufficientemente mature) nel 2019 e di lavorare nel frattempo per consolidare le specifiche dei servizi “day 1.5”.
È richiesto per le Smart Road che:
• sia realizzata la installazione in opera della piattaforma abilitante per le comunicazioni V2I e che essa sia completata con la messa in esercizio di servizi C-ITS come specificato al punto C.3.1;
• i servizi C-ITS siano disponibili almeno con riferimento alle flotte veicoli dell’ente gestore/concessionariove possibile, vi sia un accordo con altre flotte di veicoli (es.: flotte di veicoli commerciali/pesanti, flotte di veicoli a noleggio, ecc.) per la sperimentazione dei servizi messi in esercizio;
• che siano messi in esercizio e sperimentati un insieme congruo di diversi servizi (almeno 4, scelti dall’elenco del paragrafo seguente) e che almeno due dei servizi messi in esercizio e sperimentati siano basati sulla sostituzione in modalità V2I di servizi potenzialmente erogabili in modalità V2V e siano dunque basati sul rilievo e segnalazione road-side delle condizioni di deflusso;
• che la granularità spaziale delle unità di trasmissione V2I e la conseguente granularità dei servizi (inclusi quelli basati sul rilievo road-side delle condizioni di deflusso) sia congruente con il passo delle misure di tragitto tra due punti consecutivi (si veda Sezione A)
C.3.1 I servizi
Con specifico riferimento ai servizi abilitati dalle comunicazioni V2I (indipendentemente dalla contemporanea presenza di applicazioni V2V) e da considerare per la messa in esercizio sulle smart road, è il caso di rifarsi esplicitamente ai day-1 service previsti dalla piattaforma europea C-ITS e in particolare ai servizi:
1) Road works warning (segnalazione di cantieri e lavori stradali);
2) In-vehicle signage (ripetizione a bordo veicolo dei segnali stradali);
3) In-vehicle speed limits (ripetizione a bordo veicolo dei limiti di velocità – e/o di velocità di deflusso consigliate);
4) Implementazioni basate su rilievo e segnalazione road-side delle condizioni di deflusso (sostituzione con comunicazioni V2I di servizi abilitabili V2V) per:
a) emergency vehicle approaching (segnalazione del sopraggiungere di veicoli per la gestione delle emergenze);
b) traffic jam ahead warning (segnalazione di rallentamenti della corrente di traffico);
c) wrong-way-driving (segnalazione del detecting di veicoli in marcia contromano);
5) hockwave information (segnalazione all’indietro nelle correnti di traffico della diffusione delle onde di schock dovute a perturbazioni delle condizioni di deflusso a monte delle correnti);
6) Shockwave damping (smorzamento delle onde di schock quisizione di variabili cinematiche del veicolo e dello stato di funzionamento di alcuni sistemi di bordo – fendinebbia, tergicristallo, sistemi di controllo della stabilità, ecc. – per un campione di veicoli della corrente di traffico).
L’erogazione di servizi C-ITS è abilitata dalla presenza di soluzioni di comunicazione V2X. Le tecnologie utili sono quelle basate sullo standard ETSI ITS-G5 (a sua volta basato sullo standard IEEE 802.11p) e sulla telefonia cellulare, anche con riferimento alle prossime evoluzioni della tecnologia LTE/5G. In accordo con le indicazioni fornite dai documenti della piattaforma C-ITS, si ritiene opportuno, per le applicazioni non safety-critical, un modello ibrido per la piattaforma di comunicazione, eventualmente abilitato anche da tecnologie di comunicazione WiFi non-automotive e da tecnologie di comunicazione cellulare, a patto di realizzare soluzioni che disaccoppino quanto più possibile i servizi dalla tecnologia di comunicazione utilizzata per fornirli.
Sezione D – Indirizzi per la sperimentazione di ulteriori soluzioni
In questa sezione trovano posto servizi e soluzioni per le quali non si ritengono ancora maturi i tempi di implementazione o conveniente l’equilibrio tra costi di implementazione e benefici derivanti.
Le specifiche funzionali qui raggruppate sono state identificate attraverso un lungo processo di consultazione con gli stakeholder e per esse si raccomanda l’avvio della fase implementativa, attraverso sperimentazioni sempre più diffuse. Le specifiche di cui al seguente punto D.1 saranno, inoltre, oggetto del lavoro di approfondimento previsto per l’Osservatorio istituito con l’articolo 20 del presente decreto.
D.1 – Grafi, rappresentazioni, informazioni statiche e dinamiche
D.1.1 Grafo trasportistico e basi cartografiche associate
Le smart road devono essere rappresentate, a cura del gestore/cncessionario della infrastruttura, con riferimento ad un grafo orientato e connesso, esso è la base abilitante per la gestione dei servizi, per le analisi e per le soluzioni riferite al traffico e alla assistenza a passeggeri, guidatori e veicoli. Il grafo di una smart road, in linea teorica e di principio, non è un grafo cartografico, quanto piuttosto un grafo trasportistico. Per molti degli aspetti modellistici relativi alle smart road è opportuno mantenere una caratterizzazione non cartografica, particolarmente leggera ed efficiente (nonché sufficiente) per molte esigenze di rappresentazione matematica, modellizzazione, elaborazione e calcolo, per le quali geometrie e riferimenti spaziali/geografici non sono necessari né utili. Ciononostante, è necessario che il grafo trasportistico corrisponda ad un grafo cartografico (e congruentemente con questo ultimo sia generato), giacché molte delle informazioni e dei servizi che una smart road scambia con il sistema dei trasporti e con i suoi utenti si realizzano su base geografica. Inoltre, i gestori delle infrastrutture di trasporto sono obbligati, ai sensi del comma 6 dell’art. 13 del Nuovo Codice della Strada (D.Lgs. n. 285, 30 aprile 1992), nonché della successiva normazione attuativa (D.M. 1/6/2001 del Ministero dei Lavori Pubblici), a rappresentare le proprie infrastrutture all’interno del Catasto delle Strade, che è un grafo cartografico (non puramente trasportistico) congruente con il formato G.D.F.
D.1.1.1. Il grafo trasportistico
Il grafo trasportistico rappresenta entità infrastrutturali che, pur avendo un evidente riferimento spaziale e geometrico, devono essere descritte rispetto alle loro funzionalità trasportistiche, cioè al loro compito di assolvere funzioni di trasporto e mobilità. In tale ottica, il grafo è un insieme (G), composto a sua volta da due ulteriori insiemi (N, insieme dei nodi e L, insieme degli archi). Come usuale nell’ingegneria dei sistemi di trasporto, le funzioni di trasporto e mobilità (e le caratteristiche rilevanti a tali fini) sono associate agli archi del grafo e ne rappresentano gli attributi. I nodi rappresentano esclusivamente estremità di archi e un generico arco è identificabile attraverso la coppia dei suoi nodi estremi. Ove a nodi del sistema di trasporto siano associate funzioni complesse (es. intersezioni stradali più complesse, ivi comprese le rotatorie, eventualmente caratterizzate da corsie di accumulo, oppure svincoli stradali sfalsati), essi possono essere esplosi e, a seconda del livello di dettaglio richiesto, rappresentati nel grafo attraverso archi ai quali sono associati le funzioni trasportistiche elementari (es.: accessi alle intersezioni, manovre di svolta, immissioni, ecc.). I grafi trasportistici sono sempre orientati: le coppie di nodi estremi degli archi sono ordinate. Nel grafo trasportistico, i rami possono essere o meno delle entità geometriche, riferiscono implicitamente all’andamento dell’asse planimetrico di ogni carreggiata (le doppie carreggiate sono rappresentate da due assi stradali) e, in ogni caso, la eventuale natura geometrica di un arco non ha rilevanza da un punto di vista trasportistico. I grafi trasportistici escludono la possibilità di rappresentare aree e le eventuali funzioni di aree (parcheggi, aree di servizio, ecc.) sono ricondotte nei grafi trasportistici a funzioni elementari rappresentabili da uno o più archi.
Il grafo trasportistico di una smart road si deve articolare secondo tre livelli, con diversi gradi di dettaglio, garantendo comunque connessione, orientamento e verso dei grafi risultanti ad ogni livello, nonché congruenza reciproca tra i livelli. I tre livelli sono denominati, rispettivamente, layer della connettività, delle caratteristiche e dei segmenti. I layer della connettività (livello 1) e delle caratteristiche (livello 2) sono obbligatori per tutte le smart road, quello dei segmenti (livello 3) è obbligatorio per le smart road di tipo I ed è opzionale per quelle di tipo II.
Il primo livello garantisce la connettività delle infrastrutture. I nodi individuano i principali svincoli ed intersezioni che insistono sulle infrastrutture considerate e ogni coppia di nodi consecutivi individua un arco. In corrispondenza d’intersezioni con strade di scarsa importanza è possibile trascurare la rappresentazione nel grafo. Sono definite di scarsa importanza intersezioni o svincoli in corrispondenza dei quali il valore giornaliero orario immesso o emunto dalla smart road non superi i 100 veicoli/ora nel 90% dei periodi orari di un intero anno; in mancanza di conteggi in grado di verificare la precedente definizione, l’intersezione non può essere considerata di scarsa importanza. Gli archi del primo livello possono anche non rappresentare tratte omogenee d’infrastrutture, ma garantire comunque che il grafo sia topologicamente corretto, correttamente orientato e connesso. Al secondo livello ogni strada è rappresentata da uno o più archi, aventi un nodo ad ogni estremo. Si utilizzano degli archi anche per rappresentare le intersezioni principali (svincoli sfalsati, rotatorie e principali intersezioni a raso) per le quali si adotta dunque una rappresentazione definita in ingegneria dei sistemi di trasporto esplosa. Le intersezioni secondarie possono continuare ad essere rappresentate in modo puntuale e le intersezioni di scarsa importanza (come definite per il precedente livello 1) possono continuare ad essere trascurate in quanto intersezioni ma devono essere identificate dall’inserimento di un nodo (senza rami entranti/uscenti al di fuori di quelli della smart road). I nodi del grafo sono utilizzati anche per l’immissione di un arco in un’area, per i punti di interscambio tra il sistema viario e un altro sistema di trasporto, dove si abbiano discontinuità tra gli attributi trasportistici (ad esempio strade composte da più archi caratterizzati da diverse pavimentazioni, da restringimenti di carreggiata, ecc.) e in punti di intersezione con opere d’arte insistenti sul grafo (ad esempio ponti, viadotti, gallerie, ecc.). Il secondo livello definisce nel grafo tanti archi quanta è la variabilità degli attributi statici che si vogliono descrivere all’interno del modello trasportistico da realizzare; gli attributi della successiva sezione D.1.2 sono quindi riferiti agli archi del grafo trasportistico di secondo livello. È evidente che il grafo di secondo livello rappresenta un partizionamento degli archi di primo livello ed una esplosione nella rappresentazione delle intersezioni principali.
Il terzo livello è l’articolazione del grafo di secondo livello in segmenti ed è concepito per le sole Smart Roads di categoria I. Ogni ramo del livello 2 viene ulteriormente partizionato con l’interposizione di un nodo di terzo livello ogni 500 metri circa. Lo scopo è di assicurare la compatibilità con modelli dinamici di propagazione del flusso di tipo mesoscopico e di adottare, con riferimento a tali ultimi modelli, opportune discretizzazioni spaziali anche per il rilievo e l’analisi delle caratteristiche del deflusso. La granularità di 500 metri permette anche analisi omogenee (ad esempio relative alle informazioni avanzate ai viaggiatori) su tratte in cui gli archi di livello 2 sono di dimensione maggiore. Il terzo livello è utilizzato per descrivere la variabilità delle caratteristiche dinamiche di tipo trasportistico; gli attribuiti della successiva sezione D.1.3 sono dunque riferiti agli archi del grafo trasportistico di terzo livello. Infine, i sistemi di comunicazione V2I di una smart road di categoria I sono realizzate almeno con la granularità stabilita dai segmenti del grafo di livello 3.
Per le Smart Road di categoria II le caratteristiche dinamiche possono essere descritte con riferimento al livello 2 delle caratteristiche statiche (quindi anche con granularità superiore ai 500 m), oppure, opzionalmente e non obbligatoriamente, ricorrendo anche per esse alla rappresentazione del terzo livello, cioè a livello di segmenti. Analoghe considerazioni valgono per la granularità delle comunicazioni V2I di una smart road di categoria II.
La congruenza tra le rappresentazioni di diverso dettaglio deve essere assicurata. Per ogni arco di secondo livello occorre identificare esplicitamente, in fase di descrizione del grafo, l’arco di primo livello alla cui partizione contribuisce (indicando valore nullo nel solo caso in cui si tratti di una esplosione di un nodo trasportistico rappresentato al primo livello in modo puntuale). Per ogni segmento (terzo livello) occorre identificare esplicitamente, in fase di descrizione del grafo, l’arco di secondo livello che contribuisce a partizionare. I versi di percorrenza degli archi di terzo livello devono essere congruenti con quelli degli archi di secondo livello che a loro volta devono essere congruenti con quelli di primo livello. Il grafo deve essere connesso, per costruzione, a tutti i livelli di rappresentazione.
I grafi trasportistici di una smart road devono essere realizzati e certificati da tecnici di specifica e certificata qualificazione nel campo della Ingegneria dei Sistemi di Trasporto.
D.1.1.2. Le fonti cartografiche ed i rapporti con il grafo trasportistico
Il grafo trasportistico deve avere un esplicito riferimento ad un grafo cartografico (formato con primitive geometriche georeferenziate) che permetta di mantenere la necessaria corrispondenza spaziale e geometrica, opportuna per molte applicazioni sia di analisi sia di servizio agli utenti, che si realizzano su base geografica.
Dal punto di vista dei dati cartografici ufficiali disponibili su tutto il territorio nazionale, il dato di riferimento è contenuto nel Portale Cartografico Nazionale (www.pcn.minambiente.it/GN/). Il Geoportale Nazionale del Ministero dell’ambiente e della tutela del territorio e del mare opera all’interno del quadro normativo stabilito dal D.Lgs. 32/2010 e s.m.i., recepimento italiano della direttiva europea 2007/2/CE che istituisce un’infrastruttura per l’informazione territoriale nella Comunità Europea (INSPIRE). L’art. 8 comma 2 del D.Lgs. 32/2010 stabilisce che il Geoportale Nazionale sia il punto di accesso nazionale per gli scopi della direttiva INSPIRE consentendo quindi alle autorità competenti, parti terze e privati cittadini, di ricercare le informazioni territoriali disponibili.
Il Geoportale Nazionale è il fulcro di un’architettura di rete pensata come rete federata in cui ciascun nodo è “collegato” con il punto di accesso centrale che è il Geoportale Nazionale stesso. Tale aspetto risulta di fondamentale importanza per le smart roads in quanto nell’ambito di un sistema federato sono i singoli proprietari del dato a garantirne l’integrità e l’aggiornamento rendendoli nel contempo liberi da rigidità legate all’architettura HW/SW di un sistema centralizzato, ma garantendo in ogni caso l’uniformità del modello dati di riferimento. I dati del Geoportale sono anche conformi al profilo metadati italiano dettato dal decreto del 10 novembre 2011 della Presidenza del Consiglio dei Ministri che ha stabilito le “Regole tecniche per la definizione del contenuto del Repertorio nazionale dei dati territoriali, nonché delle modalità di prima costituzione e di aggiornamento dello stesso”.
Negli ultimi anni ha riscosso successo il progetto OpenStreetMap (OSM), un progetto collaborativo finalizzato a creare cartografia a contenuto libero del mondo. I dati geografici di OSM possiedono una licenza libera, la Open DataBase License (OBDL). Tutti possono contribuire arricchendo o correggendo i dati. Il repertorio cartografico relativo alle infrastrutture stradali è abbastanza ricco, spaziando da tutte le strade ai vari livelli gerarchici (motorway, trunk, primary, secondary, tertiary, unclassified, residential, service comprensivi di links quali special types, paths, ecc.), alle loro denominazioni, agli attraversamenti pedonali, alla segnaletica verticale (stop, precedenze) e semafori, ecc. OSM non mette a disposizione alcun grafo stradale in modo diretto (la cartografia è consultabile ed editabile via web). Per sopperire a tale carenza è disponibile la derivazione del dato dal repertorio OSM messo a disposizione da OpenTransportNetwork (www.opentransportmap.info). Tale progetto, completamente open source, ha derivato da OSM un grafo stradale (disponibile per tutti i paesi europei) basato sul modello dati INSPIRE (OSMtoOTM) in cui tutti gli archi e nodi costituenti sono gerarchizzati in 5 classi, in cui sono stati effettuati tutti i controlli topologici (OSM2PO), risultando essere un grafo interconnesso, orientato e quindi perfettamente navigabile. I dati (organizzati per limiti provinciali) sono liberamente scaricabili e utilizzabili, corredati di metadati che permettono di valutarne i limiti di utilizzo.
D.1.1.3 Il Catasto delle Strade ed i rapporti con il grafo trasportistico
I gestori di infrastrutture stradali sono obbligati a fornire al MIT e tenere aggiornata una rappresentazione delle infrastrutture su cui hanno competenza secondo i dettami del Decr.1/6/01 (Modalità di istituzione ed aggiornamento del Catasto delle strade), strumento applicativo dell’articolo art. 13, comma 6, del decreto legislativo 30 aprile 1992, n. 285 (Nuovo Codice della Strada). Il Catasto delle Strade è basato sullo standard europeo G.D.F. (Geographic Data File, sezione Roads and Railways); tale standard prevede che la rappresentazione delle informazioni geografiche sia articolata su tre livelli. Il livello zero è relativo all’aspetto geometrico delle strade e quindi la rappresentazione avviene attraverso le opportune primitive geometriche. Al livello 1 spetta la descrizione delle caratteristiche della infrastruttura, attraverso l’utilizzo delle giunzioni, degli elementi lineari e delle aree di traffico. Una infrastruttura è costituita, a questo livello, da uno o più elementi aventi agli estremi delle giunzioni. Le giunzioni rappresentano dunque le intersezioni tra diverse infrastrutture, così come la l’immissione di un elemento stradale in un’area di traffico (o viceversa), ma anche i punti di interscambio con altri sistemi di trasporto o qualunque altro punto dove si abbia una discontinuità delle caratteristiche dell’elemento stradale. Al livello 2 la rappresentazione è più attenta all’aspetto funzionale, finalizzato alla individuazione di tragitti e percorsi, le entità fondamentali sono la strada e la intersezione e una strada può essere costituita da più elementi stradali del livello 2; gli estremi di una strada sono sempre due intersezioni; le intersezioni rappresentano la convergenza/divergenza di più strade.
È il caso di notare che il catasto delle strade richiede la predisposizione di un grafo cartografico connesso ed orientato (diversamente da ciò che viene pubblicato nel Portale Cartografico Nazionale, che presenta le primitive planimetriche senza riferimento ad un grafo).
Si noti che il contenuto informativo realizzato dall’ente gestore/concessionario per il catasto delle strade non è concettualmente dissimile da quanto già descritto nel caso del grafo trasportistico ed è, dunque, opportuna un’interpretazione operativa dei livelli definiti dallo standard G.D.F. al caso di rappresentazione di smart roads. Essa permette un diretto utilizzo del catasto delle strade quale riferimento cartografico (quindi con geometrie e referenziazione geografica) del grafo trasportistico. L’ente gestore/concessionario può, dunque, realizzare a partire da una stessa base cartografica di riferimento (es.: OpenStreetMap) un grafo cartografico in formato G.D.F. utile per il catasto delle strade e soddisfacente anche i livelli 1 e 2 del grafo trasportistico. La tabella completa di corrispondenza tra grafo trasportistico e Catasto delle Strade per una smart road è riportata nel seguito. A scopo convenzionale e nel tentativo di ridurre elementi di confusione i livelli del Catasto delle Strade vengono denominati layer, mentre quelli del grafo trasportistico mantengono la dizione di livelli.
| Layer Catasto Strade | Livelli del Grafo Trasportistico | Note |
| Layer 0 | --- | Il layer 0 del catasto delle strade è quello cartografico delle primitive geometriche, non ha interesse trasportistico |
| --- | Livello 3 (segmenti) | Il livello dei segmenti ha finalità soprattutto modellistiche, non è rilevante per il catasto delle strade |
| Layer 1 | Livello 2 (caratteristiche) | Il layer 1 del catasto delle strade può essere realizzato con riferimento al contenuto informativo ed alle logiche di identificazione degli archi del livello 2 del grafo trasportistico |
| Layer 2 | Livello 1 (connettività) | Il layer 2 del catasto delle strade è meno dettagliato e ubbidisce soprattutto a logiche di “navigazione”, così come il livello 1 del grafo trasportistico |
D.1.1.4 Il database RDS TMC
Altra fonte che riveste una notevole importanza, soprattutto per quanto attiene applicazioni di informazione avanzata ai viaggiatori, è rappresentato dal database delle località a supporto dei sistemi RDS TMC. Il database TMC (Traffic Message Channel) descrive la rete stradale tramite un insieme di punti e strade (PoI, intersezioni, svincoli, ecc.). Rispetto a tale insieme possono essere riferiti gli eventi che accadono sulle strade. Il TMC è unico per ogni paese dell'Unione Europea: tutti i TIC (Traffic Information Center) e TCC (Traffic Control Center), nonché tutti i servizi di informazione ai viaggiatori di uno stato riferiscono allo stesso TMC. I TMC degli stati dell'Unione sono stati realizzati seguendo gli standard CEN ed assicurando l’interoperabilità tra apparati TMC-compliant indipendentemente dallo stato. Ad esempio, un ricevitore compliant allo standard RDS-TMC, semplicemente impiegando la chip-card del paese in cui si trova, può ricevere le opportune informazioni stradali. L’aggiornamento del database è centralizzato per ogni Stato e per l'Italia il gestore del database TMC è il Ministero delle Infrastrutture e dei Trasporti, attraverso il CCISS, che provvede periodicamente agli aggiornamenti ed alla distribuzione.
D.1.1.5 Conclusioni
La rappresentazione di una smart road prevede la realizzazione a cura del gestore/concessionario della infrastruttura di un grafo trasportistico strutturato su più livelli di dettaglio. D’altra parte, un notevole numero di informazioni viene generata dai sistemi di trasporto su base geografica, così come su base geografica vengono forniti agli utenti della strada alcuni servizi propri delle smart road. Per tale motivo, è opportuno che il grafo trasportistico sia associato ad un grafo cartografico che segua gli standard delle rappresentazioni cartografiche digitali. Tale esigenza è rafforzata dalla legislazione nazionale ed europea che prevede sia la necessità per i gestori delle strade di realizzare e manutenere una descrizione (congruente con lo standard GDF ed anche essa articolata su più livelli di dettaglio) della infrastruttura per il Catasto delle Strade gestito dal Ministero delle Infrastrutture e Trasporti (MIT), sia la necessità che le reti nazionali di servizio, comprese quelle dei trasporti, siano trattate secondo la direttiva europea Inspire e rese disponibili presso il Portale Cartografico Nazionale (PCN) del Ministero dell’ambiente e della tutela del territorio e del mare. Altro aspetto rilevante per una smart road è che la sua rappresentazione a livello di modello di dati sia compatibile ed interoperabile con lo standard TMC-RDS diffusamente utilizzato allo scopo di fornire servizi di informazione avanzata agli utenti della strada e di comunicare in maniera efficiente e standardizzata eventi dinamici relativi al traffico. La normativa impone anche agli enti gestori delle strade di tenere aggiornata la rappresentazione (anche ai fini TMC-RDS) delle proprie infrastrutture attraverso l’Indice Pubblico delle informazioni sulle Infrastrutture e sul Traffico (IPIT), gestito dal MIT attraverso il CCISS. D’altra parte, sono ampiamente disponibili alcune fonti cartografiche di notevole successo e frequentemente aggiornate, seppure non con valore di riferimento ufficiale. Un esempio è la piattaforma cartografica OpenStreetmap (OSM) nella quale sono realizzate collaborativamente e aggiornate basi cartografiche per le reti stradali di tutto il mondo. La piattaforma OSM prevede anche alcuni progetti destinati a favorire l’integrazione dei database TMC-RDS europei, il supporto per lo standard GDF su cui è basato il Catasto delle Strade e il supporto degli standard proposti dalla direttiva Inspire su cui è basato il PCN. Lo stesso IPIT sta avviando attività tecniche finalizzate all’integrazione della fonte OSM (replicata presso il CCISS come progetto CCISS-OSM) e, in particolare, all’integrazione con il database TMC-RDS. Un’integrazione e razionalizzazione del sistema, fondata anche sulla condivisione e riuso, è dunque non solo auspicabile ma anche possibile.
D.1.2 Caratteristiche statiche delle infrastrutture
Le caratteristiche statiche delle infrastrutture devono essere descritte da parte dei gestori delle infrastrutture e dunque per ogni ramo del corrispondente grafo. Le caratteristiche da descrivere sono riportate nella seguente tabella, che assume il valore di specifica tecnica. Le informazioni identificate con un asterisco sono quelle previste anche dal punto 1 dell’allegato al regolamento delegato europeo 962/2015. Nel caso di infrastrutture a carreggiate separate, le caratteristiche devono essere ripetute per ogni carreggiata. Alle infrastrutture deve essere associato un verso convenzionale usato come riferimento per descrivere le direzioni di marcia su di esse; si può utilizzare come direzione convenzionale di riferimento, a titolo di esempio, il verso topologico di digitalizzazione dell’infrastruttura come elemento di un grafo cartografico di riferimento, è opportuno verificare che le convenzioni siano congruenti con quelle utilizzate nel database TMC-RDS. Per infrastrutture a carreggiate non separate è necessario compilare le informazioni in verso sia concorde sia discorde a quello convenzionale della infrastruttura; nel caso di senso di marcia unico, le informazioni del verso concorde o discorde (a seconda del verso effettivo di marcia) saranno nulle.
| Famiglia di caratteristiche | Caratteristica | |
| Caratteristiche indipendenti dal verso di marcia | Riferimenti altri grafi | Identificativo del ramo corrispondente del grafo cartografico di riferimento (es.: OSM) |
| Identificativo del ramo corrispondente del Catasto delle Strade (livello 1 standard GDF) | ||
| Quota s.l.m. (media delle quote degli estremi del ramo) | ||
| Andamento planimetrico * | Tipo di tratto (rettilineo, curvo, di transizione) | |
| Raggio di curvatura (ND per tratti rettilinei e "variabile" per raccordi di transizione) | ||
| Andamento altimetrico * | Tipo di tratto (livelletta, di transizione) | |
| Pendenza (valore medio per tratti di transizione) | ||
| Raggio raccordo verticale (ND per livellette) | ||
| Opera d'arte | Tipo opera d'arte (ponte, viadotto, galleria, …) | |
| Classificazione * | Infrastruttura rete TEN-T | |
| Infrastruttura SNIT ma non TEN-T | ||
| Classificazione infrastruttura secondo CdS | ||
| Classificazione infrastruttura secondo norme CNR | ||
| Velocità di progetto infrastruttura | ||
| Classificazione amministrativa secondo ente gestore/concessionario | ||
| Classificazione amministrativa territoriale (nazionale, regionale, metropolitana, comunale, locale) | ||
| Caratteristiche dipendenti dal verso di marcia (ripetere per verso concorde e discorde rispetto a quello convenzionale della infrastruttura) | Sezione trasversale * | Numero di corsie di marcia |
| Larghezza media di una corsia di marcia | ||
| Numero di corsie di sosta/emergenza | ||
| Larghezza media di una corsia di emergenza/sosta | ||
| Presenza di una piazzola di sosta/emergenza | ||
| Limiti di velocità * | In condizioni ordinarie | |
| In condizioni di pioggia | ||
| In condizioni di neve | ||
| In condizioni di nebbia | ||
| Limitazioni particolari per mezzi pesanti | ||
| Descrizione di eventuali limitazioni differenziate per corsia di marcia | ||
| Progressiva di presenza sistema di enforcement (null se sistema non presente) | ||
| Progressiva termine presenza sistema di enforcement (null per sistema non presente o sistema puntuale) | ||
| Limitazioni alla circolazione * |
Classi di veicoli non ammessi | |
| Limitazioni temporanee su base ciclica per categorie di veicoli | ||
| Presenza di segnaletica ad inizio tratto* | Descrizione identificativa del segnale | |
| Caratteristiche per la sicurezza | Apparati di illuminazione stradale | |
| Presenza, tipo e stato di barriere di sicurezza | ||
| Rischi tipici (caduta massi) | ||
| Ostruzioni particolari (restringimenti, limiti di altezza, ecc.) | ||
| Esposizione ad “accidenti” (frane, alluvioni, ecc.) | ||
| Manufatti | Presenza e tipo (gallerie, ponti/viadotti, ecc.) | |
| Stato dei manufatti (stress/guasti) | ||
| Anno di realizzazione dei manufatti | ||
| Anno di ultima manutenzione straordinaria dei manufatti | ||
| Postazione di pedaggio* | Presenza a inizio tratto | |
| Identificazione dei pedaggi applicabili | ||
| Identificazione delle modalità di pagamento disponibili | ||
| Ubicazione di aree di sosta* | Progressiva relativa di ubicazione (concorde con direzione convenzionale) | |
| Tipo di servizio (area attrezzata, breve/lungo periodo, …) | ||
| Ubicazione punti di ricarica veicoli elettrici * | Progressiva relativa di ubicazione (concorde con direzione convenzionale) | |
| Condizioni di uso (rete riservata, pubblico, abbonamento, …) | ||
| Caratteristiche tecniche ricarica (potenza erogata, …) | ||
| Ubicazione punti di rifornimento nonelettrici * | Progressiva relativa di ubicazione (concorde con direzione convenzionale) | |
| Condizioni di uso (rete riservata, pubblico, abbonamento, …) | ||
| Presenza benzina | ||
| Presenza Diesel | ||
| Presenza Gas | ||
| Presenza Metano | ||
D.1.3 Caratteristiche dinamiche delle infrastrutture
Per le Smart Road di tipo I le caratteristiche dinamiche delle infrastrutture devono essere descritte dai gestori delle infrastrutture con riferimento al layer dei segmenti, per le Smart Road di tipo II, ove in mancanza del layer dei segmenti (non obbligatorio), le caratteristiche dinamiche sono descritte con riferimento al layer delle caratteristiche, in aggiunta a quelle statiche. Le caratteristiche da descrivere sono riportate nella seguente tabella, che assume il valore di specifica tecnica. Le informazioni identificate con un asterico sono quelle previste anche dal punto 2 dell’allegato al regolamento delegato europeo 962/2015. Nel caso di infrastrutture a carreggiate separate, le caratteristiche devono essere ripetute per ogni carreggiata. Alle infrastrutture deve essere associato un verso convenzionale usato come riferimento per descrivere le direzioni di marcia su di esse; si può utilizzare come direzione convenzionale di riferimento, a titolo di esempio, il verso topologico di digitalizzazione dell’infrastruttura come elemento di un grafo cartografico di riferimento; occorre assicurare la coerenza del verso convenzionale tra layer di segmenti e layer di caratteristiche e quindi, indirettamente, la congruenza con i versi convenzionali del database TMC-RDS. Per infrastrutture a carreggiate non separate è necessario compilare le informazioni in verso sia concorde sia discorde a quello convenzionale della infrastruttura; nel caso di senso di marcia unico, le informazioni del verso concorde o discorde (a seconda del verso effettivo di marcia) saranno nulle.
| Famiglia di caratteristiche | Caratteristiche | |
| Riferimenti altri Grafi | Identificativo del ramo corrispondente del grafo cartografico di riferimento (es.: OSM) | |
| Ripetere per ogni verso di marcia (concorde/discorde a verso convenzionale della infrastruttura) così come definito dalla descrizione delle caratteristiche statiche | Chiusure al traffico * | Identificativo della corsia |
| Motivo della chiusura (incidente, lavori, ecc.) | ||
| Inizio e fine programmati della chiusura | ||
| Segmento/arco di inizio, continuazione o fine chiusura | ||
| Aperture al traffico * | Identificativo della corsia | |
| Motivo della apertura (es.: corsia dinamica) | ||
| Inizio e fine programmati della apertura | ||
| Segmento/arco di inizio, continuazione o fine apertura | ||
| Inversione del senso di marcia * | Identificativo della corsia | |
| Motivo della inversione del traffico (incidente, lavori, ecc.) | ||
| Inizio e fine programmati dell’inversione di senso di marcia | ||
| Segmento/arco di inizio, continuazione o fine inversione | ||
| Divieto di sorpasso (per ogni categoria di veicolo) * | Identificativo della corsia | |
| Categoria di veicolo | ||
| Divieto di cambio corsia | ||
| Limiti velocità dinamici (per ogni categoria di veicolo) * | Identificativo della corsia | |
| Categoria di veicolo | ||
| Limite di velocità | ||
| Transito mezzi speciali | Identificativo della corsia | |
| Percorrenza prevista (SI/NO) | ||
| Inizio e termine previsto per la percorrenza | ||
| Cattive condizioni della pavimentazione | Identificativo della corsia | |
| Tipo di cattiva condizione (dissesto, ridotta aderenza, ecc.) | ||
| Motivo della condizione (frana, usura, pioggia, neve, ghiaccio, olio, …) | ||
D.2 Monitoraggio geotecnico e strutturale
D.2.1 Caratteristiche di sicurezza statica delle strutture
Le modalità di misura e le relative caratteristiche strumentali, da predisporsi a cura del soggetto gestore/concessionario dell’infrastruttura, dovranno consentire di apprezzare in modo chiaro ed inequivocabile lo stato dei componenti critici dell’infrastruttura. Dovrà inoltre essere progettato il sistema specifico di misura in modo da garantire l’individuazione di stati anomali della struttura (es.: deformazioni e fessurazioni significative, presenza di danneggiamenti dovuti a degrado dei materiali e/o ad azioni accidentali) sia in termini di localizzazione del danno che di stima della sua entità. Tali sistemi di misura potranno anche avvalersi di soluzioni per il monitoraggio satellitare di infrastrutture e territorio.
| TIPOLOGIA STRUTTURA | VARIABILI DA MISURARE |
| Impalcato del Ponte | Per ogni ponte, spostamenti generalizzati e stati deformativi locali |
| Pile e Spalle | Per ogni pila e spalla, spostamenti generalizzati e vibrazioni |
| Gallerie | Per ogni galleria, spostamenti generalizzati e stati deformativi locali |
| Muri di Sostegno | Per ogni muro di sostegno, spostamenti generalizzati |
| Fondazioni in alveo | Per ogni fondazione, scalzamento con misura combinata di stati deformativi locali, spostamenti generalizzati e vibrazioni |
| Paravalanghe | Per ogni paravalanghe, spostamenti generalizzati |
| Frane | Per ogni punto di misura inclinometri fissi a passo 1 m lungo il foro di controllo |
| Barriere in acciaio (tipo guard rail) | Per ogni tratto continuo di barriera, urti |
| Barriere in cemento (tipo New Jersey) | Per ogni modulo, urto e spostamento |
| Barriere stradali mobili | Per ogni modulo, urti |
| Portali segnaletici | Per ogni portale, spostamenti generalizzati e vibrazioni |
Nella tabella che segue sono riportati i risultati attesi della aggregazione delle misure, elaborate ed aggregate in modo tale da consentirne l’utilizzazione diretta per confronto con le previsioni di modelli strutturali descrittivi del comportamento delle opere.
| Misura | Modalità di aggregazione Modalità di elaborazione ed aggregazione delle misure |
| Impalcato da Ponte | Deformata globale e stati tensionali locali ◊ Per ogni impalcato ◊ Per l'intera struttura |
| Pile e spalle | Forme modali e relative frequenze Livelli tensionali locali Deformazione di insieme |
| Gallerie | Deformata del rivestimento e stati tensionali associati |
| Muri di sostegno | Stati deformativi globali |
| Fondazioni in alveo | Variazioni dello stato tensionale nelle pile Variazioni delle forme modali e relative frequenze, Deformazioni di insieme |
| Paravalanghe | Stati deformativi globali e tensionali locali |
| Appoggi e giunti | Movimenti anomali e/o fuori corsa |
| Barriere | Urti |
| Portali segnaletici | Stati deformativi globali ed eventuali variazioni delle forme modali e relative frequenze. |
| Frane | Spostamenti del terreno lungo la profondità e la superficie monitorata |
D.2.2 Elaborazione e Aggregazione delle misure
Il trattamento dei dati provenienti dal monitoraggio strutturale (ponti, viadotti, gallerie ecc.) segue un processo analogo a quanto previsto per i dati provenienti dalle infrastrutture viarie. Per tutte le opere, le misure in tempo reale devono essere registrate dal soggetto gestore/concessionario dell’infrastruttura con possibilità di accesso ad un mese di storia nel caso di eventi straordinari (sisma, frana ecc.). I dati disaggregatati riferiti al monitoraggio strutturale devono essere conservati in un repository per un tempo minimo di un mese.
Il primo processo di aggregazione richiede un’analisi via cloud almeno giornaliera, in periodi di presenza e di assenza di traffico.
Le elaborazioni e analisi delle misure devono essere condotte da tecnici con competenza specifica nel campo dell’ingegneria delle strutture civili. Annualmente, o nei casi ove se ne ravvisi la necessità con cadenza superiore, un tecnico incaricato del monitoraggio strutturale dovrà emettere un rapporto sullo stato della struttura e sull’eventuale necessità ed urgenza di interventi di riparazione. In ogni caso, il sistema esegue un primo controllo in automatico mediante la definizione di soglie di allarme. Le soglie di allarme devono essere definite dai tecnici che hanno progettato il monitoraggio e sono stabilite in funzione del modello strutturale, del numero di sensori, dalle soglie di sicurezza ecc. Il superamento delle soglie di allarme deve essere analizzato da un tecnico che deve emettere un report sulle possibili cause e prevedere in maniera proattiva possibili interventi che possono comprendere:
› Ulteriori indagini sulla struttura;
› Intensificazione della frequenza di monitoraggio;
› Proposte di ri-verifica strutturale;
› Proposte di intervento.
Deve altresì essere previsto un sistema di allarme automatico, provvisto delle necessarie ridondanze e sicurezze per ridurre la possibilità di falsi allarmi, nonché di comunicazione multicanale (SMS, email, ecc) per avvertire i gestori della infrastruttura e le Autorità Preposte alla Sicurezza (VVFF, Protezione Civile ecc.) nel caso il sistema dovesse rilevare significative anomalie nella sicurezza della struttura monitorata. Le analisi provenienti dal monitoraggio strutturale consentono al gestore/concessionario di sviluppare piani di manutenzione associati ai livelli si rischio ed alle esigenze di interventi urgenti. Questo consente di ottimizzare le risorse disponibili per la manutenzione delle strutture.
D.3 Modello digitale delle infrastrutture (strumenti BIM)
Il processo di trasformazione digitale delle strade coinvolge per sua natura molteplici aspetti che spaziano dall’analisi dell’area di influenza, alla valutazione delle interferenze che le strade hanno con le altre infrastrutture, fino alla interazione con opere strutturali, architettoniche e impiantistiche. Questa multidisciplinarità richiede il trattamento di dati in formati differenti. Unitamente ai tracciati planoaltimetrici è necessario gestire da un lato le informazioni legate al territorio mediante piattaforme GIS (banche dati alfanumeriche relazionate con cartografie digitali) che trattano tipicamente superfici o rappresentazioni puntuali, e dall’altro i dati che riguardano le opere strutturali e architettoniche, tipicamente modellate come solidi. Questo fattore non è però limitato all’aspetto squisitamente geometrico, ma è legato soprattutto al contenuto informativo delle rappresentazioni medesime. Per tale motivo gli esperti del Department of Business Innovation and Skills (UK) hanno introdotto una classificazione in tre livelli per qualificare il grado di maturità del processo di modellazione digitale e di interazione tra gli attori del processo stesso; dal semplice primo livello costituito dai modelli CAD 2D, si passa ai formati 3D (secondo livello) sino allo stadio in cui a ciascun oggetto del modello sono associate tutte le informazioni utili perla distribuzione in cloud del prodotto gestibile interattivamente in multipiattaforma (terzo livello). Il BIM (Building Information Model) è lo strumento che meglio si adatta a tali esigenze operative nei diversi ambiti e in tutti gli stati di avanzamento del ciclo di vita dell’opera, dalla concezione alla dismissione.
Le infrastrutture viarie devono riferire ad una implementazione specifica degli strumenti BIM, si tratta dei cosiddetti BIM lineari o infrastrutturali. La piattaforma BIM infrastrutturale consente a tutti gli attori di interagire con un modello unico condiviso, e permette a ciascuno di essi di operare all’interno delle proprie aree di competenza. Grazie a questa tecnologia, anche detta dei Quadri DCM (Design, Construct, Maintenance), gli specialisti condividono le modifiche da loro apportate al modello e contemporaneamente ricevono quelle realizzate da altri utenti; tutti gli operatori partecipano così allo sviluppo del modello in maniera dinamica. Ciò permette di evitare inutili copie di file, di semplificare la gestione delle diverse parti dell’opera, di garantire un continuo monitoraggio dell’avanzamento della modellazione e di verificare l’operato di ciascuno degli utenti interagendo direttamente con essi.
Nel suo oramai consolidato impianto, il BIM è dunque uno strumento - metodologico e tecnologico - finalizzato alla gestione dei processi e delle fasi operative di modellazione digitale delle opere. La Direttiva Europea 2014/24/EU raccomanda l’utilizzo del Building Information Modeling (BIM). Le piattaforme BIM infrastrutturali, nel quadro della più generale innovazione determinata dalla metodologia IMM (Information Management & Modeling), consentono di gestire dati disomogenei per definizione formale e informazioni associate ai contenuti geometrici. Il supporto del BIM è essenziale per la configurazione di un contenitore di gestione dati di natura topografica, delle nuvole di punti (Point Clouds, PC), dei rilievi laser scanner per l’acquisizione intensiva di dati di raffittimento, delle mesh, ecc. Tutte le informazioni elaborate in formati non necessariamente interconnessi devono essere omogeneizzate nei contenuti e nell’architettura informatica. I dati possono essere rielaborati per la generazione del modello digitale del terreno costituito da una successione di superfici (modelli di elevazione generati per tassellazione e triangolazione). A partire da questi (e da altri) dati di base, è possibile pervenire alla ricostruzione digitale dell’asse tridimensionale della strada. In base agli allineamenti e mediante la definizione delle sezioni trasversali, la piattaforma BIM permette di generare il modello tridimensionale dell’infrastruttura, comprensivo di ulteriori elementi caratteristici: stratigrafia delle sovrastrutture e dei sottofondi, fossi e cunette, reti di drenaggio delle acque di piattaforma, impianti speciali, opere complementari, sottoservizi, ecc. In pratica operando per fasi su elementi bidimensionali si giunge alla creazione di un modello tridimensionale. Il modello 3D consente pertanto di visualizzare l’infrastruttura e la piattaforma BIM ne evidenzia le relazioni con l’ambiente circostante.
Il BIM consente pertanto di pervenire alla caratterizzazione di ciascuno degli elementi del modello infrastrutturale mediante la definizione di classi di oggetti. Una struttura di questo tipo presuppone la suddivisione della strada in un numero definito di componenti e la conseguente associazione ad esse di un adeguato contenuto informativo. La piattaforma BIM assicura inoltre la possibilità di estrarre dal modello le planimetrie, i profili longitudinali e le sezioni trasversali in qualunque momento. Gli elaborati possono essere dinamicamente aggiornati a seguito di eventuali modifiche apportate al modello per interventi di adeguamento e/o manutenzione straordinaria del corpo viario. Un dei principali punti di forza della modellazione parametrica delle infrastrutture è pertanto l’interoperabilità con le altre piattaforme BIM, ovvero la possibilità di trasferire contenuti informativi generati da applicativi software diversi utilizzando sistemi aperti (OpenBIM, buildingSMART bSI); tra questi ultimi il formato più diffuso è noto come IFC (Industry Foundation Classes, basato sullo standard ISO 16739:2013) che ha raggiunto un notevole grado di maturità in campo architettonico e strutturale.
All’interno della piattaforma BIM i modelli IFC per le infrastrutture dialogano agevolmente con i modelli IFC architettonici/strutturali.
La modellazione parametrica del solido stradale e le relazioni di questa con strumenti di gestione di area vasta richiedono pertanto specifici standard. Il primo passo verso l’estensione del formato IFC alle Infrastrutture è stato già compiuto e riguarda in particolare il modello geometrico del tracciato (bSI Final Standard, luglio 2015); mentre lo standard completo per le infrastrutture è ancora in lavorazione a cura di (bSI e OGC Open Geospatial Consortium). Attualmente lo standard più diffuso per le infrastrutture è il LandXML perchè favorisce il cosiddetto “modello collaborativo” (interazione operativa tra tutte le figure professionali coinvolte nel processo di digitalizzazione).
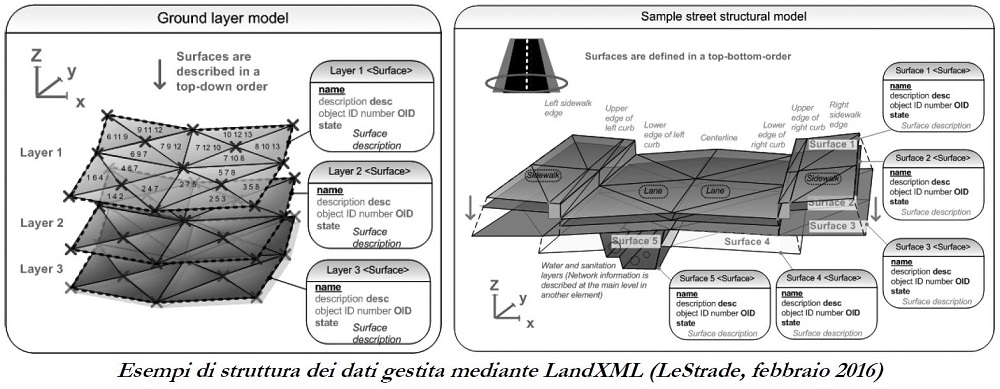
La trasformazione digitale 3D delle infrastrutture viarie può essere inoltre estesa all’analisi dei tempi (BIM 4D), alla gestione dei costi (BIM 5D) e infine alla gestione della manutenzione stradale (BIM 6D).
Un’esigenza specifica della trasformazione digitale delle opere viarie consiste nell’acquisizione delle caratteristiche geometriche delle strade esistenti. Il processo è noto come reverse engineering, o Scan to BIM, e genera modelli ad oggetti implementabili e fruibili in piattaforme BIM. Gli oggetti a geometria solida sono generati mediante PC derivati da procedure di scanning. Tali tecniche di generazione Scan to BIM sono ad oggi scarsamente automatizzate e devono essere utilizzate da operatori esperti in grado di manipolare dati interoperabili in ambiente multipiattaforma. Il workflow delle operazioni che compongono il processo di trasformazione dei dati metrici in volumetrie digitali e modelli parametrici è di seguito sintetizzato.
1. Acquisizione sul campo delle misure: l’output di questa fase consiste in PC, allo stato grezzo prive di vuoti informativi, relazionabili con altre PC;
2. Georeferenziazione delle PC: inserimento dei dati in un sistema di riferimento geografico unitario;
3. Creazione della superficie tridimensionale (DTM, Digital Terrain Model) a partire dalla PC;
4. Generazione e classificazione degli elementi BIM: è in questa fase che si costruiscono gli oggetti IFC da integrare nel modello complesso;
5. Modellazione BIM della Smart Road
Allegato B al Decreto del 28/02/2018
Disposizioni relative al contrassegno di Veicolo Sperimentale a Guida Automatica (VGA)
Il contrassegno VGA comprende un recto e un verso, ciascuno diviso verticalmente in due metà, riportati nelle fìgure 1 e 2.

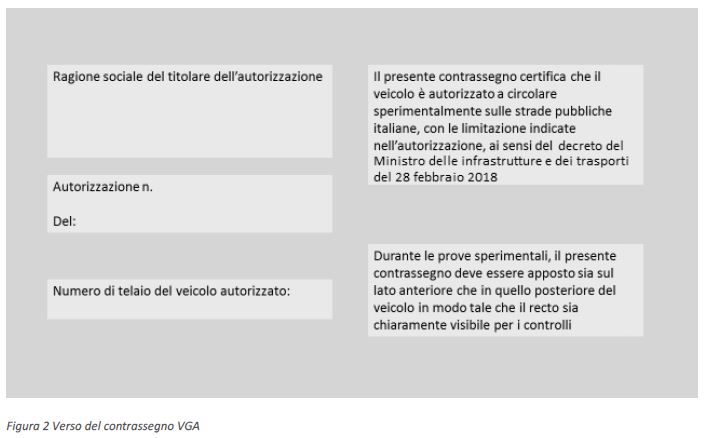
Le misure del contrassegno VGA sono le seguenti:
- altezza: 106 mm
- larghezza: 148 mm
Il colore del contrassegno VGA è arancione chiaro, tranne il simbolo dell'auto guida automatica, bianco su fondo arancione scuro.
Il contrassegno VGA è plastificato.
La metà sinistra sul recto contiene:
- il simbolo dell'auto a guida automatica;
- la data di scadenza del contrassegno;
- il numero di serie del contrassegno.
La metà destra del recto contiene:
- la scritta in stampatello "Auto Sperimentale a Guida Automatica";
- la scritta "Ministero delle Infrastrutture e dei Trasporti - Dipartimento per i Trasporti, la navigazione, gli affari generali e il personale - Direzione Generale per la motorizzazione";
- sullo sfondo la sigla dello Stato Italiano.
La metà sinistra del verso contiene:
- La ragione sociale del titolare dell’autorizzazione;
- Il numero di telaio dell’auto sperimentale autorizzata;
- Il numero dell’autorizzazione.
La metà destra del verso contiene:
- la scritta: "Il presente contrassegno certifica che il veicolo è autorizzato a circolare sperimentalmente sulle strade pubbliche italiane, con le limitazioni indicate nell’autorizzazione, ai sensi del decreto del Ministro delle infrastrutture e dei trasporti 28 febbraio 2018”;
- la scritta: "Durante le prove sperimentali, il presente contrassegno va posto sia sul fronte che sul retro del veicolo in modo tale che il recto sia chiaramente visibile per i controlli".
Vedi anche: